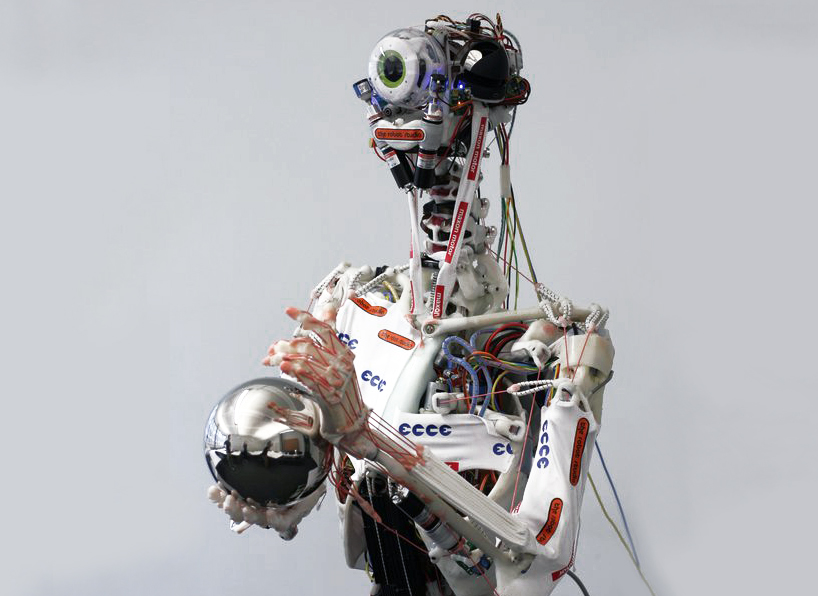
‘eccerobot’ is a anthropomimetic robot torso
over two years after its original exhibition, designboom checks in with ‘eccerobot‘, the first anthropomimetic robot torso, designed as a means of investigating machine consciousness by closely modeling the device’s skeletal and internal structure to that of humans. earlier this year, new machinery framework for ‘eccerobot’ was awarded 1st place at the international cultural and academic meeting of engineering students. the development of ‘eccerobot’ is led by robotics specialist owen holland with the ETF robotics research group at the university of belgrade.
‘standard humanoid robots mimic the human form, but the mechanisms used in such robots are very different from those in humans, and the characteristics of the robots reflect this. this places severe limitations on the kinds of interactions such robots can engage in, on the knowledge they can acquire of their environment, and therefore on the nature of their cognitive engagement with the environment.‘ – the ETF research team
the most recent updates to ‘eccerobot’ involve developing higher-level cognitive functioning, using reinforcement learning as a means of ‘teaching’ the device new functions. a virtual simulation of reinforced learning techniques, for example, is presented in the video at the end of this article (here).
demo of ‘eccerobot’ in motion, at FET (european future technologies) 2011 video via popsci
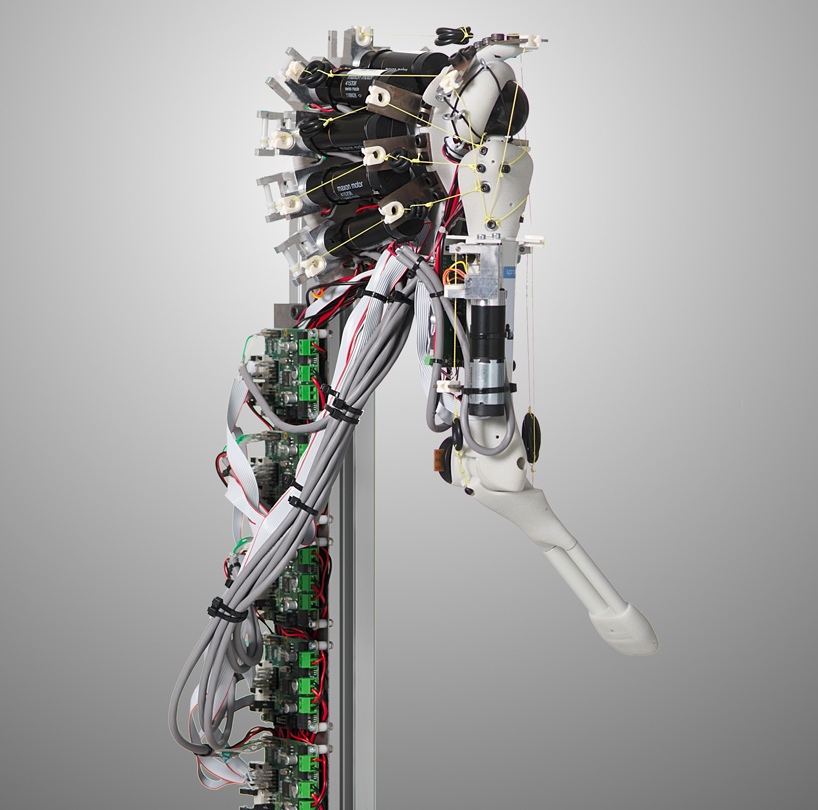 tendons and actuators
tendons and actuators
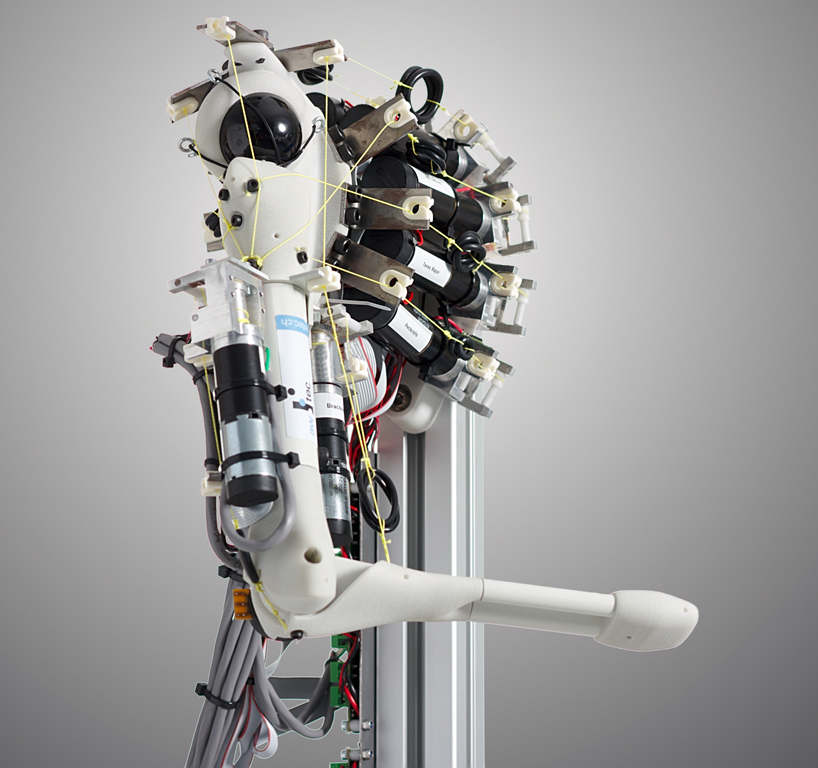 additional view
additional view
the bones and joints of ‘eccerobot’ are composed of thermoplastic polymorph, a high tensile polymer that softens when heated and can thus be molded into precise forms. about 80 ‘muscles’ each rely on an individual actuator for their motion, each composed of a screwdriver motor with gearbox, kiteline ‘tendons’, and elastic shock cord.
the sensor system covers proprioception (one’s sense of the position of his own body parts), visual processing, audio with vibrational sensors, an inertial unit, and tactile feedback. throughout these systems, the engineers seek to mimic human reflexes and input processing; for example generating an artificial vestibulo-ocular reflex, which is responsible for the reason a human can shake his head while reading a book without impeding his vision of the text but not while keeping his head still and shaking the book at the same speed. two high-definition cameras with field programmable gate arrays allow for efficient preprocessing and processing of visual input. two microphones imitate the simultaneously directional and acoustical audio characteristics read by human ears, although vibration and impact sensing through accelerometers offer an additional source of data.
the behaviour and ‘cognitive functioning’ of the robot consists of voluntary and involuntary movement control units, ‘ECCEOS’ (a physics-based computer model that compiles much of the data and functions together), and a higher level unit uniting ‘perception’, ‘planning’, and ‘decision-making.’
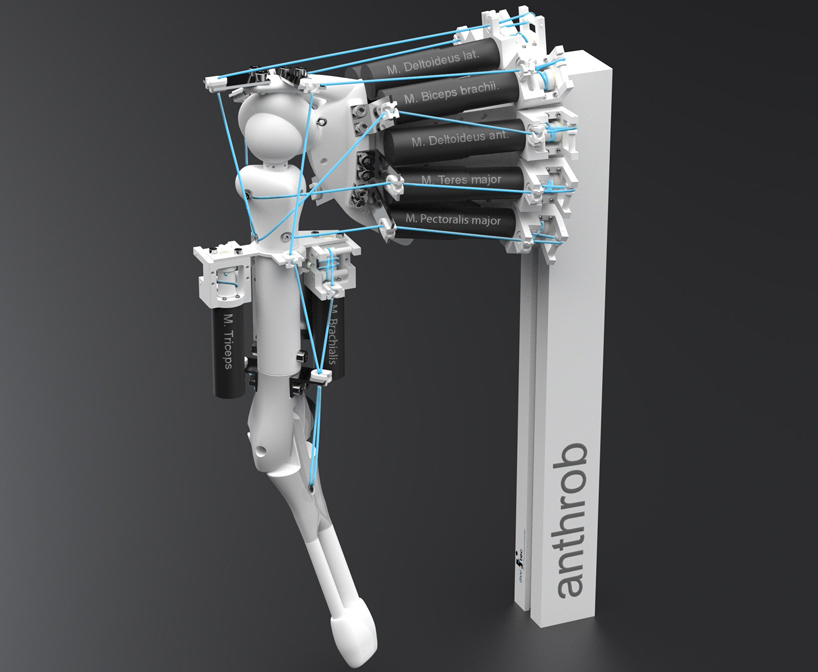 mechanical rendering of the bones and muscle system in the arm
mechanical rendering of the bones and muscle system in the arm
introductory demo to ‘eccerobot’, including how it is constructed
the most recent video by the team features a rendering of the physics-based model progressing in its ability to touch a target via reinforcement learning
ROBOTS (529)
 Mar 19, 2024
Mar 19, 2024 Mar 04, 2024
Mar 04, 2024 Feb 06, 2024
Feb 06, 2024PRODUCT LIBRARY
 Mar 21, 2024
Mar 21, 2024 Mar 13, 2024
Mar 13, 2024 Feb 24, 2024
Feb 24, 2024 Feb 07, 2024
Feb 07, 2024