PUC-rio’s design labs put the 3D printing process in motion with 3&Dbot
all images courtesy of NEXT and LIFE labs from PUC-rio
3D printers can be big, heavy, and have one major limitation: the dimensions of the objects they can print are confined by their own size. these issues posed the conceptual starting point for ‘3&Dbot’, a project by NEXT (three-dimensional experimentation lab) and LIFE (physical computing lab) of PUC-rio‘s design program.
video courtesy of NEXT and LIFE labs from PUC-rio
once the entities came together, they sought to answer one question: ‘how could we design a portable intelligent object that would be able to overcome the physical limitation of the 3printer by building structures freely in space?’ after thorough research and development, they envisioned an autonomous 3D-printing robot capable of creating structures freely in space. in order to make all of this possible, various technological tool needed to be implemented and taken into deep consideration. by embedding an arduino micro-controller with wireless communication into the body, industrial omni wheels can be maneuvered in virtually any direction. pin-point accuracy of its mechanisms and position within a field of motion are negotiated by TUIO fiducial markers act as references for video tracking. its printing head can use a variety of materials such as modeling clay, ceramics, and earthenware.
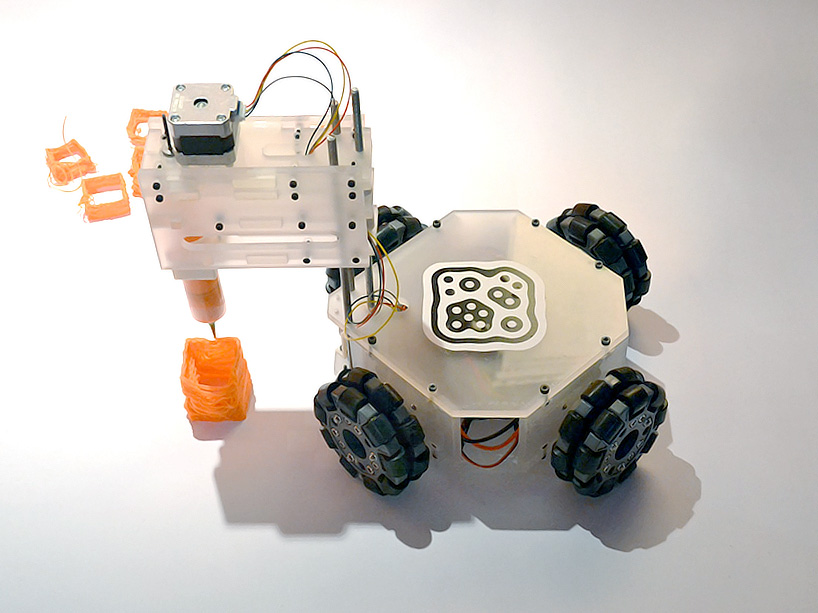
the robot from above
the device can print in a variety of materials
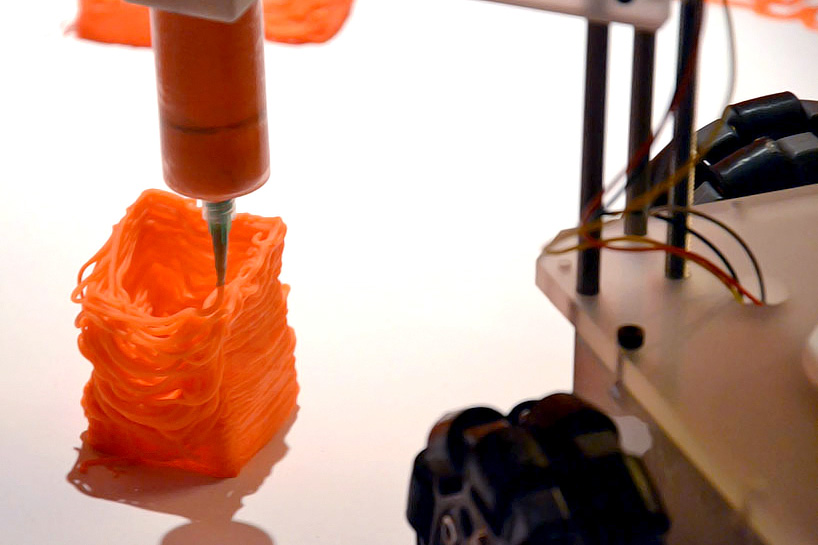
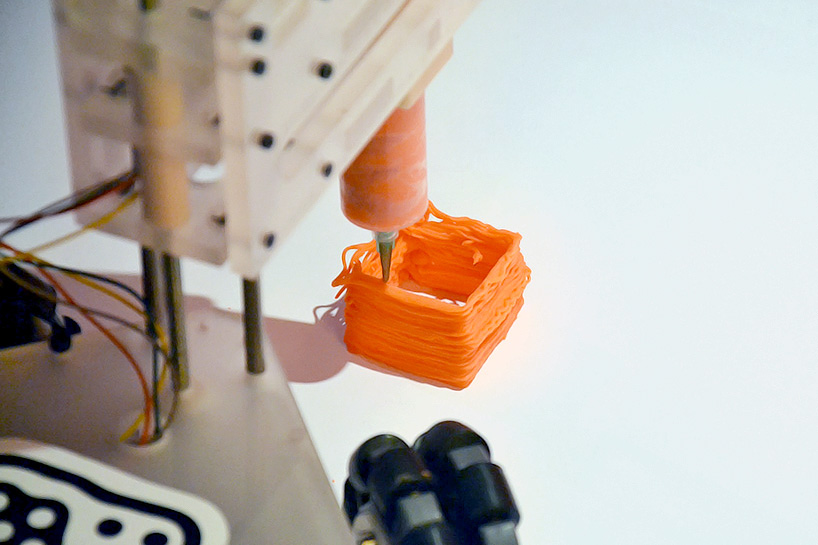
stacking up layers
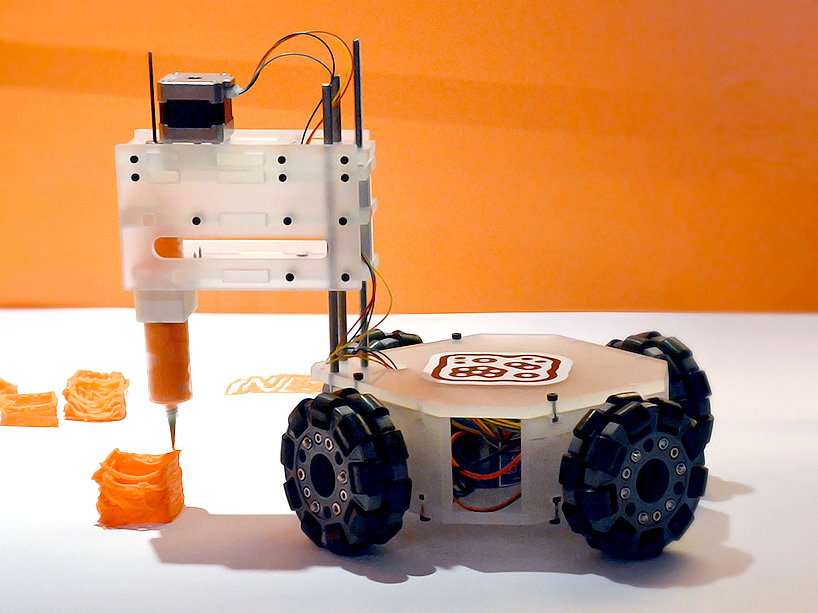
the world’s first autonomous 3D-printing robot
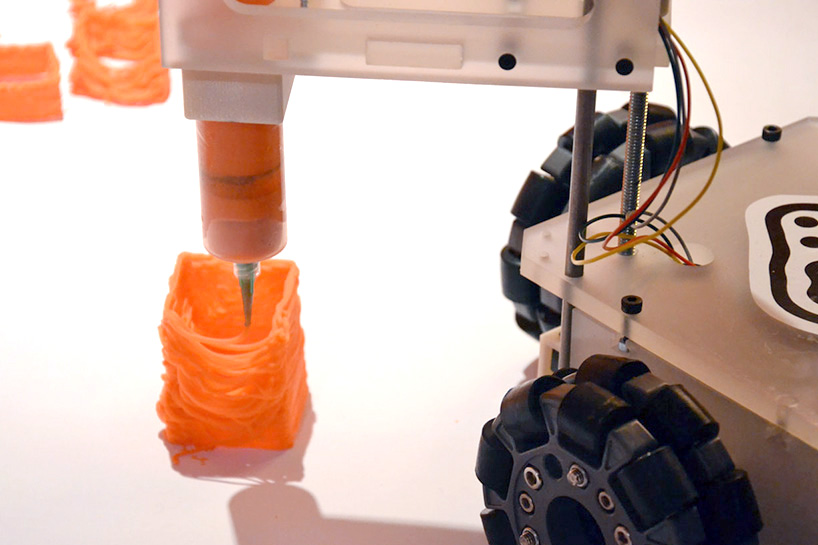
printing in orange
the omni wheels can move in any direction
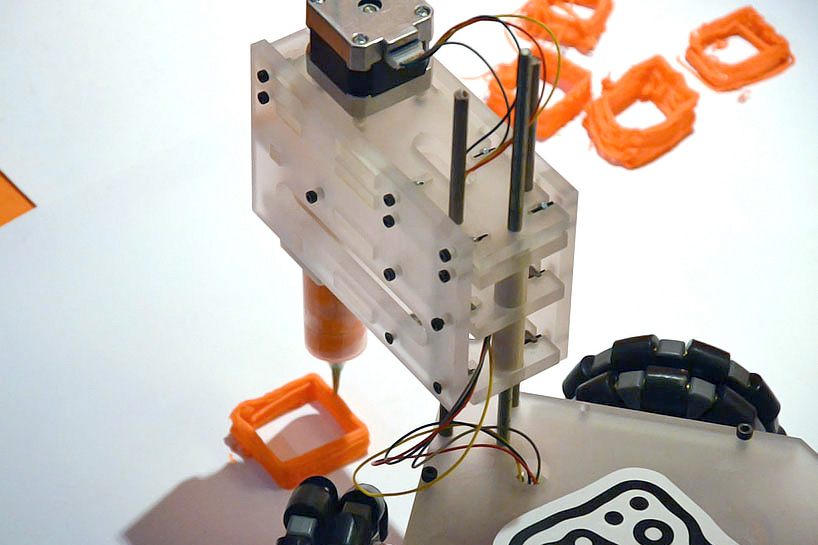
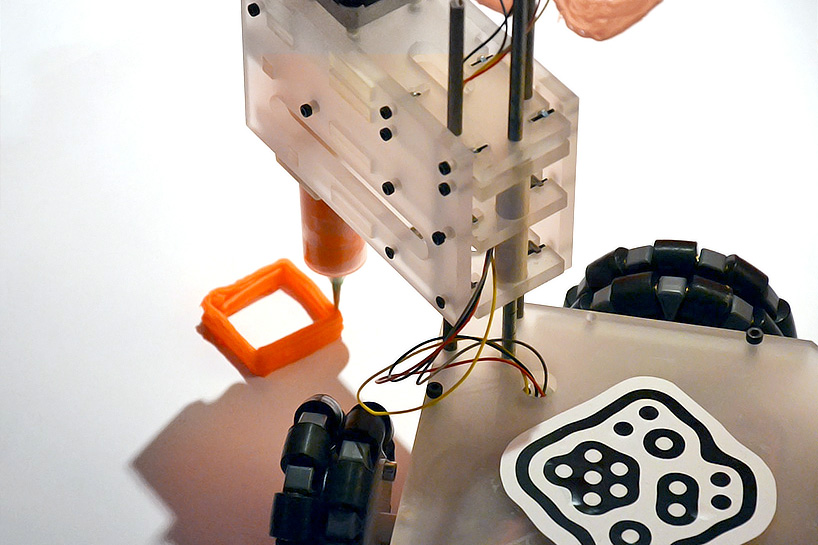
detail of the head components
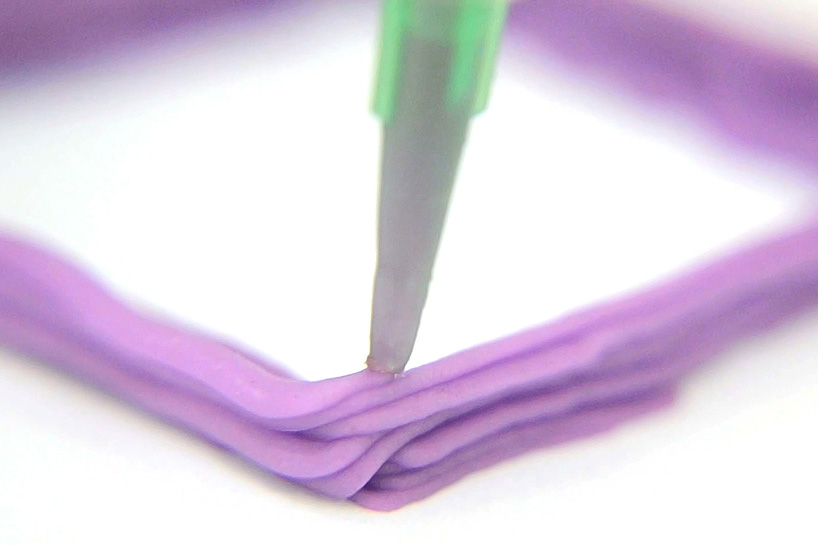
closeup of the process
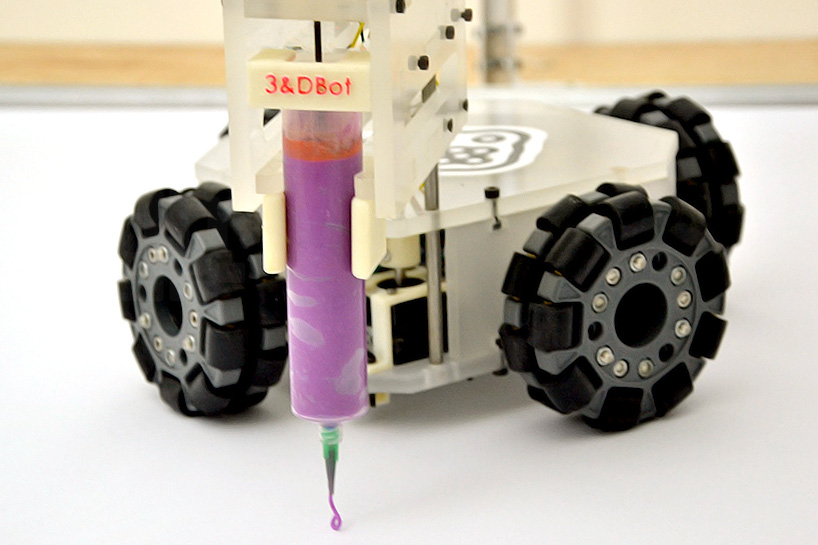
starting a print job
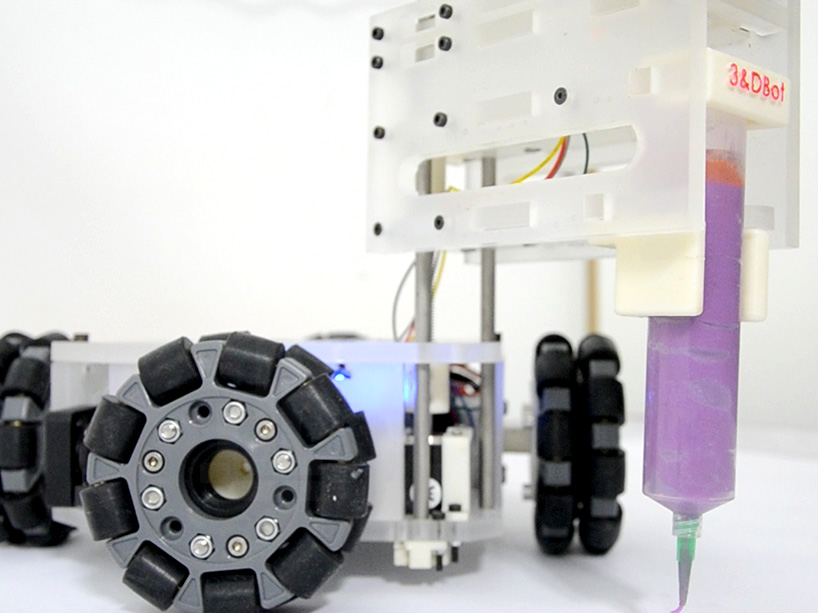
detail of the omni wheels
designboom has received this project from our ‘DIY submissions‘ feature, where we welcome our readers to submit their own work for publication. see more project submissions from our readers here.
3D PRINTING (746)
 Apr 25, 2024
Apr 25, 2024 Apr 10, 2024
Apr 10, 2024 Apr 02, 2024
Apr 02, 2024ARDUINO (9)
 May 20, 2019
May 20, 2019 Jan 01, 2017
Jan 01, 2017 Dec 02, 2014
Dec 02, 2014 Jun 12, 2014
Jun 12, 2014 Feb 19, 2014
Feb 19, 2014ROBOTS (529)
 Mar 19, 2024
Mar 19, 2024 Mar 04, 2024
Mar 04, 2024 Feb 06, 2024
Feb 06, 2024PRODUCT LIBRARY
 Apr 22, 2024
Apr 22, 2024 Mar 21, 2024
Mar 21, 2024 Mar 13, 2024
Mar 13, 2024 Feb 24, 2024
Feb 24, 2024