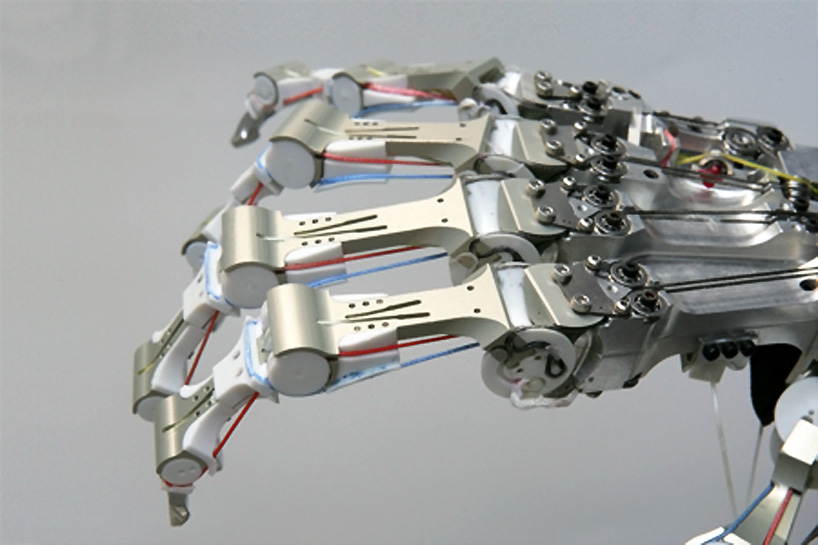
the DLR robotic hand-arm system closely models the shape, size, and dynamics of a human hand
a new robotic hand-arm system, capable of generating 30 newtons of force and of withstanding impacts from a hammer and baseball bat, has been developed at the institute of robotics and mechatronics in the german aerospace centre (DLR).
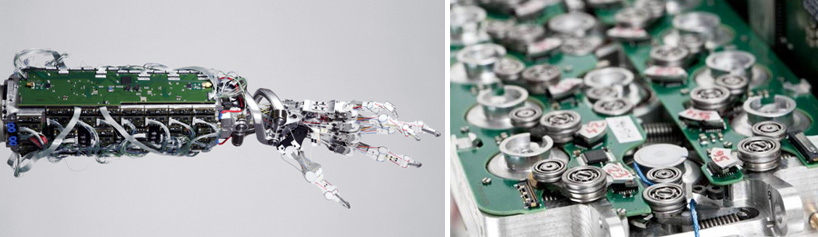 left: full view of the arm and hand right: detail on the motor and spring system contained on the forearm, driving the tendons
left: full view of the arm and hand right: detail on the motor and spring system contained on the forearm, driving the tendons
the design of the DLR hand more closely mimics the kinematic and dynamic properties of the human arm and hand.
five independently functioning fingers are articulated via a web of 38 tendons, each composed of polyethylene fiber and connected to a tiny motor and spring on the forearm. because the individual components of each finger are held together by these fibers, rather than connected directly to one another, the system enables the stiffness of each tendon to be controlled, allowing the hand to absorb shocks. the hand boasts 19 degrees of freedom, just one less than its human equivalent.
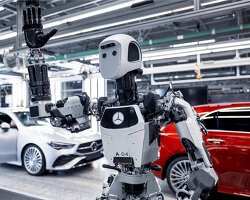
 left: the arm integrated into a fuller robotic system right: detail on the fingers of the current model
left: the arm integrated into a fuller robotic system right: detail on the fingers of the current model
the DLR engineers cite as their motivation for the project the fact that the increased use of robotic systems in space and industry technology is hindered by the high risk of expensive damage to the machines, as well as the insufficiency of current systems to approximate human activities like running or grasping diverse objects.
this video demos the movement of the robot’s fingers, followed at 0:37 by impact tests
via engadget
ROBOTS (529)
 Mar 19, 2024
Mar 19, 2024 Mar 04, 2024
Mar 04, 2024 Feb 06, 2024
Feb 06, 2024PRODUCT LIBRARY
 Apr 22, 2024
Apr 22, 2024 Mar 21, 2024
Mar 21, 2024 Mar 13, 2024
Mar 13, 2024 Feb 24, 2024
Feb 24, 2024