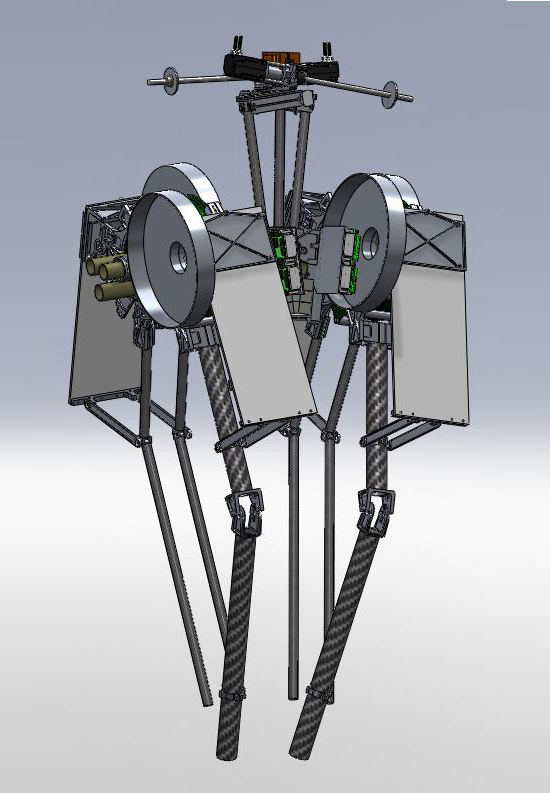
a biped robot design being built by researchers at oregon state university image courtesy of oregon state university
if robotic locomotion is ever to achieve some of what we want, it will have to use less energy. a biped robot design being built by researchers at oregon state university holds the potential to reduce energy use while improving robotic locomotion. this work reflects some important fundamental advances in the understanding of robotic motion. humans deal with this problem by flexing opposing pairs of muscles, to change the dynamic properties of their arm. for a robot, the more it is able to do one of these tasks, the less able it is to do the other. animals, including ostriches, have a great ability to respond to unexpected disturbances while running, and can provide insights into the needed robotic equivalent – combining spring-mass models with ‘force control actuators’.
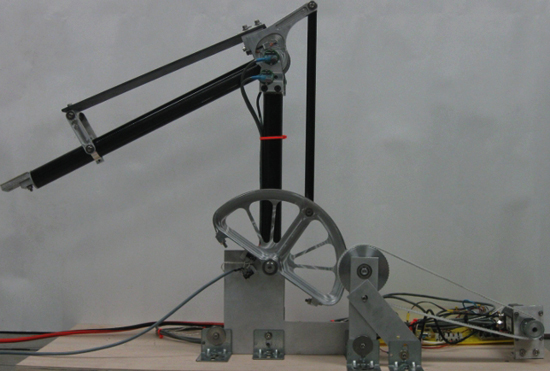 a test platform for a single degree of freedom force controlled actuator. the system measures the force applied by measuring the deflection in the spring. different springs of widely varying stiffness can quickly be exchanged.image courtesy of oregon state university
a test platform for a single degree of freedom force controlled actuator. the system measures the force applied by measuring the deflection in the spring. different springs of widely varying stiffness can quickly be exchanged.image courtesy of oregon state university
for robotic manipulation tasks in uncertain environments, good force control can provide significant benefits. the design of force-controlled actuators typically revolves around developing the best possible software control strategy. the newest findings from the dynamic robotics laboratory at OSU are being presented at two conferences, including the IEEE conference on robotics and automation. more info is available here.
ROBOTS (529)
 Mar 19, 2024
Mar 19, 2024 Mar 04, 2024
Mar 04, 2024 Feb 06, 2024
Feb 06, 2024PRODUCT LIBRARY
 Apr 22, 2024
Apr 22, 2024 Mar 21, 2024
Mar 21, 2024 Mar 13, 2024
Mar 13, 2024 Feb 24, 2024
Feb 24, 2024