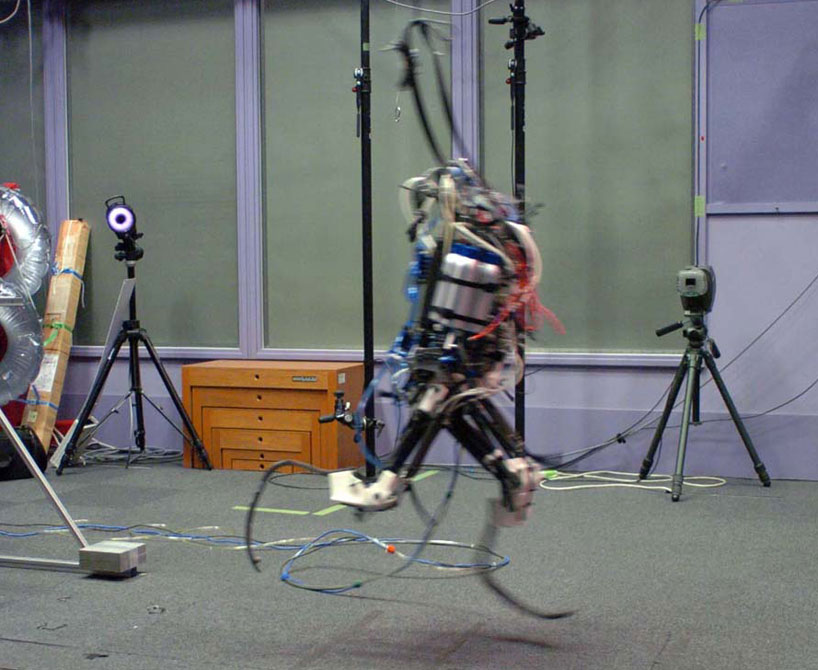
‘athlete’ in motion all images courtesy of ryuma niiyama
japanese engineer ryuma niiyama has sent us images of his project ‘athlete’, a bipedal robot that runs on legs powered by pneumatic muscles. designed while he was a PhD candidate at the university of tokyo, ‘athlete’ was developed in collaboration with niiyama’s colleague satoshi nishikawa and advisor professor yasuo kuniyoshi. the goal of the project was to understand the principles of animal motion, particularly the dynamic and agile movements of the human athlete.
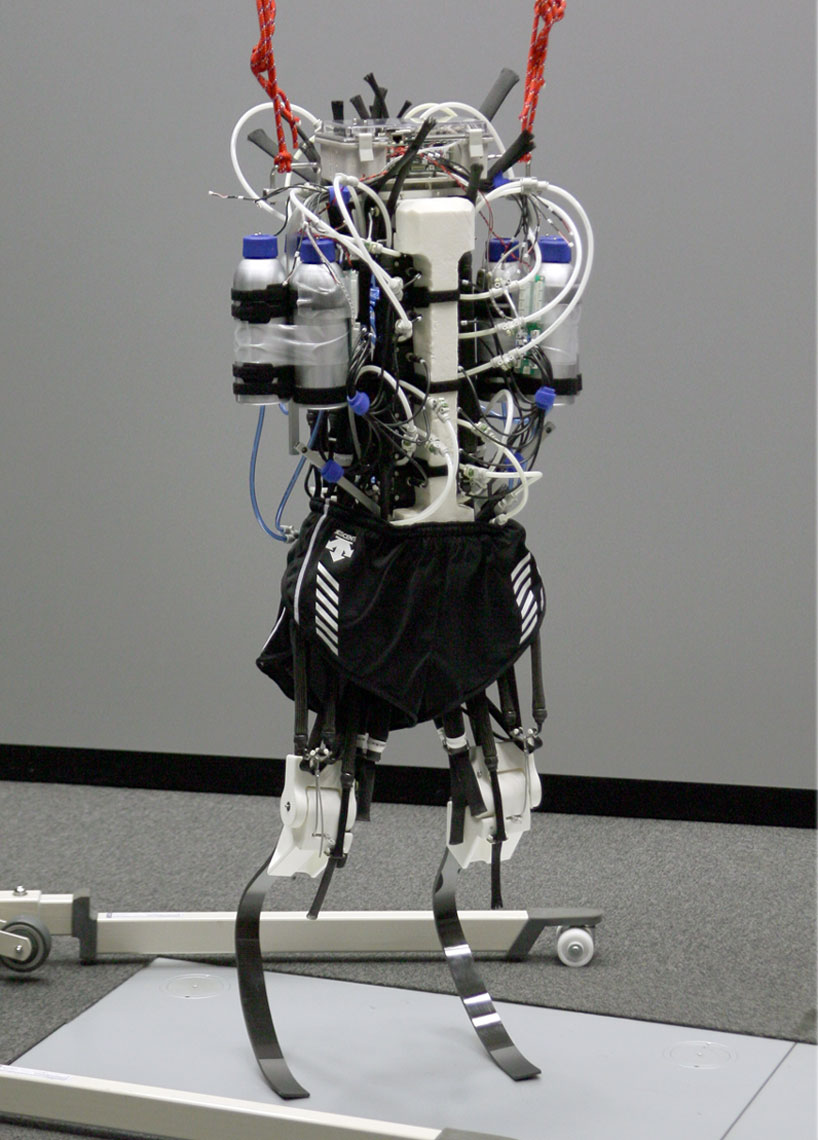 ‘athlete robot’
‘athlete robot’
the key idea of the project was to extract the essential properties of the human body and build an ‘artificial’ musculoskeletal system for the robot. during their research the group rediscovered a value of pneumatic artificial muscle that was developed during the 1950’s. known as ‘air muscle’, it is a lightweight and powerful device, that is suitable for explosive movements.
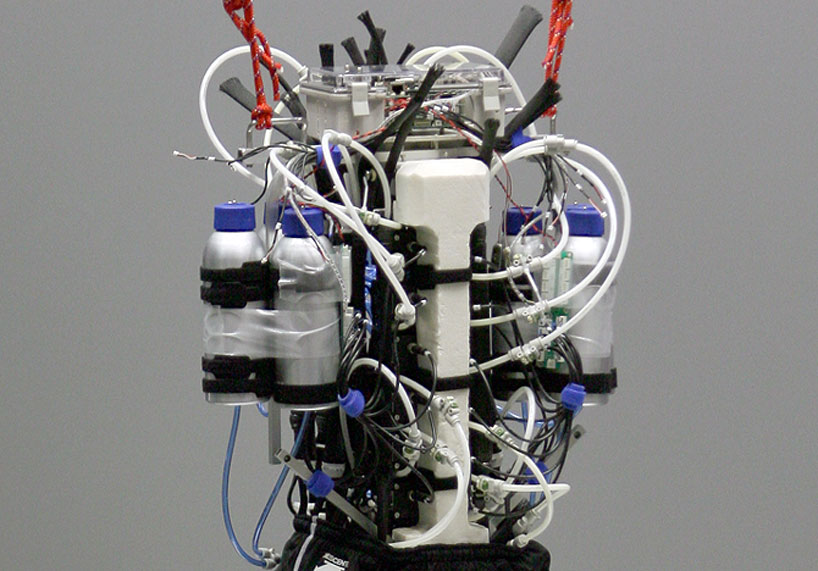 detail of the robot’s mechanics
detail of the robot’s mechanics
each leg has seven sets of artificial muscles, containing one to six penumatic actuators that resemble over-sized muscle fiber. elastic blades are used for the robot’s feet and are based on the latest research in sports biomechanics. the springy legs allow for natural and efficient movements, while the ‘bones’ of the robot are made mostly of nylon and carbon FRP (fiber reinforced polymer). the design process of the bio-inspired (mechanisms learned from animals), was a complex process of discovering the essentials in harmony between engineering and biology.
 each foot is made from an elastic blade
each foot is made from an elastic blade
 biological to mechanical breakdown
biological to mechanical breakdown
 rendering of the mechanics
rendering of the mechanics
 different components of ‘athlete’
different components of ‘athlete’
via singularity hub
ROBOTS (529)
 Mar 19, 2024
Mar 19, 2024 Mar 04, 2024
Mar 04, 2024 Feb 06, 2024
Feb 06, 2024PRODUCT LIBRARY
 Mar 21, 2024
Mar 21, 2024 Mar 13, 2024
Mar 13, 2024 Feb 24, 2024
Feb 24, 2024 Feb 07, 2024
Feb 07, 2024