adaptive skins by Sushant Verma from uk
designer's own words:
1. Introduction
Our lives are surrounded by constantly changing forces of nature and environment. Everything is in a constant state of flux, with varying degrees of dynamism. Our lives too, are always in motion. The spaces we inhabit are constantly changing as well, although the change is slow and occurs through non-physical conditions. The physical state of the inhabitable spaces are more or less constant and not in motion. A building envelope consists of vertical (facade) and horizontal (roof) components which protects the building from direct external environment and helps in maintaining comfortable interiors along with providing structure and stability to the building. A traditional building skin thus provides stability, regulates air pressure (fenestrations) and protects the interiors from direct environmental factors (sunlight, rain and wind). Building skins are a vital component to resolve the issues of responsive architecture as they are a medium through which the intelligence can be imparted to the building system to respond to an environmental stimulus. Thus key characteristic of an effective intelligent building skin is its ability to modify energy flows through the building envelope by regulation, enhancement, attenuation, rejection or entrapment.
The project adaptive [skins] questions the static nature of architectural spaces, and engenders dynamism and motion in architecture in a complex and dynamic environment. The line of research is responsive and dynamic architecture, where developments and advancements have been made in the past, dealing with dynamism and kinetics in architecture. However, a major setback in the current precedents lies in the use of mechanical control to create dynamism, which in most cases, is only for spatial effects and aesthetics. An attempt has been made in the research to deal with a bigger issue, for creating dynamism and response, for dealing with multiple environmental parameters which affect the internal conditions and energy efficiency. Also, there is an attempt to embed material intelligence into the system, to rule over the use of mechanical control, partially or completely. The use of two parameters- heat and light, become a major breakthrough in the research, as the problem becomes complex and requires efficient use of computation for problem-solving.
2. Interconnected Systems
To initiate the experiments to develop a system that is energy efficient, a component based approach is chosen. A local change, input as a force or actuation into a system, has the ability to bring about a global effect, if certain conditions of component aggregation are satisfied. These conditions are connectivity, flexibility and lightness (weight). This principle is exploited by developing interconnected systems using a component based systems. A series of experiments are carried out in physical and digital medium, simultaneously, for real-time calibration. This is the chosen workflow of experiments during the course of the research.
2.1 Folded Geometry
The first set of experiments that are carried out to generate interconnected systems, explore folded geometry. To have a lightweight component system, paper models are used. A series of folded geometries are developed from a single surface of sheet, with folding based on ridges and valleys. The level of complexity is varied in different models by changing the overall pattern to understand the range of effects that can be produced. Since heat and light are the primary parameters guiding the evaluation of the effect, changes in the face angles is studied, along with general deformation and movement in the system. In some of the experiments, holes are punctured at strategic positions – on the crease and on the faces, and shadows patterns are studied in different states of motion.
2.2 Triangulated Mesh Geometry
The next experiment is started as a physical model to create a mesh system, using rigid members and flexible joints. The resultant geometry is a triangulated mesh system in the form of a double layered space frame. All the joints in the system are made flexible and kept loose. Light-weight cardboard struts are used as the compression members in the system, tied with strings at joints to create flexibility. Force is applied to the mesh from two points and four points without restraining the model at any joint. Different physical states of the mesh are observed. It is concluded that the control-ability factor of the kinetics of the mesh is low because of no constraints or restrictions at the joints, with respect to angles or axes. The degree of freedom is very high, leading to a number of permutations of physical states.
3. Tensegrity Systems
Combing the possiblities of the previous two systems into a more dynamic yet controlled system which allows to be more flexibile and stable, tensegrity systems are chosen. In 1962, Fuller and Snelson patented Tensegrity (Oppenheim and Williams 1997). Tensegrity systems are those composed of two types of discrete members, tension members and compression members that form self-stressing structures.
3.1 Using Tensegrity To Produce A Responsive Architectural Envelope:
To develop the model into a dynamically controlled system an actuator is incoporated, by replacing side tension members by Nitinol Springs. Nitinol is a Shape Memory Alloy made up of Nickel and Titanium. The shape memory has an ability to return to its orginal shape after any deformation due to any force, by heating to a particular temperature. Using this concept forward, when heat is supplied to the new tensegrity model, the nitinol spring comes back to orginal shape, and when the heat supplied is stopped the model returns to its orginal shape due to the tension supplied by other tension members. This defomation is studied and developed to control the form of the system which can be further developed into a skin. The system's actuation depends on the external paramters such as heat and light, to control depending on various factors.
3.2 Component Development
The exploration is devloped into two types, 3 strut and 4 strut tensegrity system which is further developed into various options, depending on the orientation of surfaces to understand the behaviour of these systems. A Digital Evaluation is required to evaluate these model.
4. Evaluation Parameters
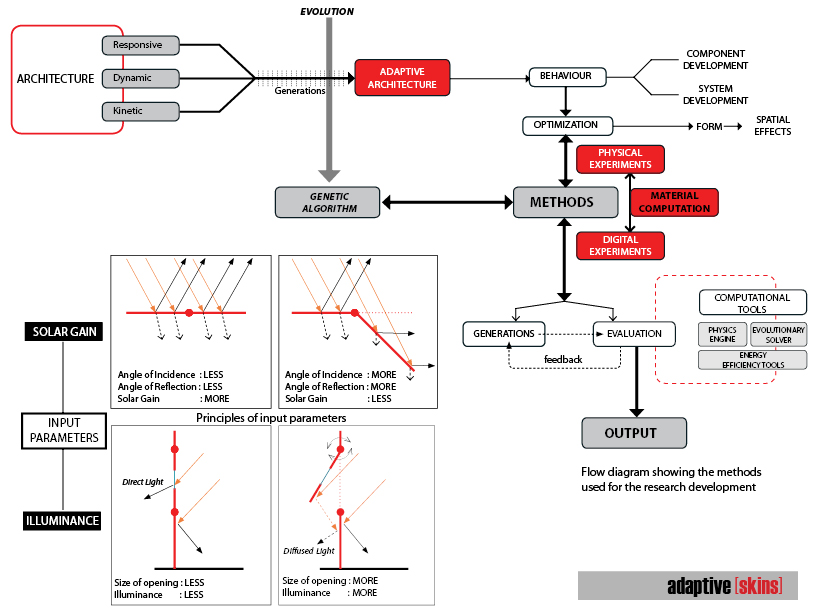
For development of system two parameters Heat and Light which are quantified in terms of Solar Radiation and Solar Exposure respectively, are considered to evaluate the efficiency of the system.
The efficiency of the system varies with the responsiveness of the morphology of the system to ever changing climatic.
During summers, due to high temperatures and excessive glare, the system changes its morphology by two methods:
1. By increasing the angle of incidence directly incident on the surface so as to decrease the incident solar radiation which would in turn reduce the temperature on the surface.
2. By changing the size and angle of the opening thereby decreasing the direct light and increasing the diffused light through the surface.
This alteration in solar radiation on the skin and exposure through skin is required by the inner spaces with respect to location, activity within the space which varies with time of day , season or year. The same system is required to optimize individual parameters accordingly, how different seasons have different requirements of same parameters.
5. Genetic Algorithm
5.1 Requirement for a genetic algorithm
An optimization technique is necessary to evaluate the efficiency of the system, which could involve Multiple Simulation Parameters and Multiple Evaluation Parameters using the Single System. So a computational method based on abstracted logics of biological evolutionary processes is found to be appropriate as the optimization is an iterative process for seeking solution which was described by John Holland in the 1960’s. It recognizes the fact that software already has a genotype and phenotype embedded in the code.
5.2 Parametric Model
Parametric model/system are controlled by several simulation parameters which are also called genes. These parameters control the form and function of the system which in-turn affect the efficiency.
5.3 Real Time Analysis
Based on the Evaluation Parameters or the Fitness Criteria - Solar Exposure and Solar Radiation, two scripts were for Real-Time analysis. To find the efficiency of the system a real time analysis is required which evaluates in parallel with the change in genes of the system.
5.4 An Evolutionary Solver
An Evolutionary Solver is incorporated in the algorithm due to the various possibilities of output which can be obtained out of the algorithm, a solver is required to collect, store, compare and analyse the large amount of data produced and finally give an optimized result according to the required fitness criteria
6. System Development
Systems developed from the previous components based on the location and orientation of the surface is compared using multiple evaluation parameters to test the efficiency of the system and the developed algorithm. The algorithm revealed results by showing change in amount of exposure and solar radiation for same location, time and area/ volume of test surface. At the end of the tests, 3 Strut Tensegrity System - Option 3 and 4 Strut Tensegrity System - Option 1 exhibited maximum range for solar exposure and incident solar radiation respectively. The above two systems are further developed into passive and active systems respectively.
7.Passive System and Active System
Taking the research to the architectural scale, two distinct types of building skin systems are developed: Passive and Active.
7.1 Passive system
Passive System incorporates Shape Memory Alloy Nitinol, as actuators to create kinetics into a tensegrity system comprising of 3-strut tensegrity components. The nitinol acts like a sensor and an actuator in the system, and no external energy is required for the system to function. The passive system is based on material intelligence, depending on the configuration of nitinol springs ( sensors + actuators ) in an aggregation of 3-strut tensegrity components. The passive system senses the temperature change (surface temperature on nitinol springs) which compress to 0.4 times its original length, constrained by another fixed member in each component. Each actuator contributing to the interconnected system, leads to an emergent effect where the system moves within the constraints of pre-defined anchor points. As the dynamism occurs in the system, the angle of incidence on each face of the skin changes with time, and reduces the solar gain through the skin, by self-adjustments. The configuration of the system with defined locations of actuators, control the behaviour of the skin. Light entering through the skin, can also be controlled with this behaviour.
7.2 Active system
Active system uses the same principle with an aggregation of 4-strut tensegrity components and pneumatic actuators as the actuators. There is a sensing mechanism, where sensors send the signals based on the conditional requirements to a Building Management System (BMS) which sends an electrical signal to the actuators. More control and accuracy can be achieved in this system. It is a combination of material intelligence and high-tech control, where heat and light requirements can be regulated for summer and winter conditions, irrespective of solar conditions, unlike the passive system.
8. Design Proposal
8.1 Design Proposal- Passive System _ New Delhi
Nehru Place in New Delhi is chosen as a testing site for the passive system. It is a commercial market where a linear pedestrian street is chosen as the site, which currently faces the problem of excessive heating and exposure to sun. A roof system is proposed for this linear street, where internal conditions can be controlled and regulated without the use of any electronic or mechanical device in place. The material intelligence with nitinol springs take control of the roof which is moving with the solar radiation falling on it. As the temperature in Delhi can rise up to 45°C during peak summers, and even higher surface temperatures can be achieved, the energy can be harnessed to drive the mechanism of actuation. A mesh system is proposed based on the density analysis of the existing street, designed algorithmically using rules based on simulations of the 3-strut tensegrity system. The roof system has 30 triangular meshes with an infill of the 3-strut tensegrity system skin, which individualy create dynamism within their respective constraints of anchor points, to control the internal conditions on the street.
8.2 Design Proposal – Active System_Barcelona
The Museum of Contemporary Arts in Barcelona is chosen as the testing site for the active system. The south-east façade which currently exists as a glazing with horizontal louvers to control the light entering the atrium behind it, is used as the testing façade and replaced by the active system with 4-strut tensegrity components and pneumatic actuators, which come as steppers to control the actuation in steps. Anthropometrics and simulation results for 4-strut tensegrity system are used as a basis of selection of scale of the components. Solar insolation analysis on the existing atrium guides the arrangement and configuration of components as well as the anchor points on the vertical skin. The result is a continuously moving skin, which can be static at times, and dynamic at others, controlled by a BMS, depending on heat and light requirements in the atrium.
9. Conclusion
Passive system - The proposed system is evaluated with a daylight factor analysis which proves that a comfortable exposure condition is maintained throughout a day, in the space, as the roof system self-adjusts and regulates the sun light penetrating through it.
Active system - The final proposed system is evaluated by simulating a daylight factor analysis for the atrium, which is compared against an analysis performed for the existing skin. The results show a significant improvement in the internal conditions, which can be regulated as per the requirements, for summers and winters, through a day, and even at night, to create spatial effects.
Introduction Methods – Genetic Algorithm[jwplayer config=”mplayer” width=”818px” height=”600px” file=”https://static.designboom.com/wp-content/compsub/366915/2013-02-26/video_1_1361879676_3a0b696a709135db92fd1e8431e06651.mp4″ html5_file=”https://static.designboom.com/wp-content/compsub/366915/2013-02-26/video_1_1361879676_3a0b696a709135db92fd1e8431e06651.mp4″ download_file=”https://static.designboom.com/wp-content/compsub/366915/2013-02-26/video_1_1361879676_3a0b696a709135db92fd1e8431e06651.mp4″]video
Methods – Genetic Algorithm[jwplayer config=”mplayer” width=”818px” height=”600px” file=”https://static.designboom.com/wp-content/compsub/366915/2013-02-26/video_1_1361879676_3a0b696a709135db92fd1e8431e06651.mp4″ html5_file=”https://static.designboom.com/wp-content/compsub/366915/2013-02-26/video_1_1361879676_3a0b696a709135db92fd1e8431e06651.mp4″ download_file=”https://static.designboom.com/wp-content/compsub/366915/2013-02-26/video_1_1361879676_3a0b696a709135db92fd1e8431e06651.mp4″]video
 Algorithm Development
Algorithm Development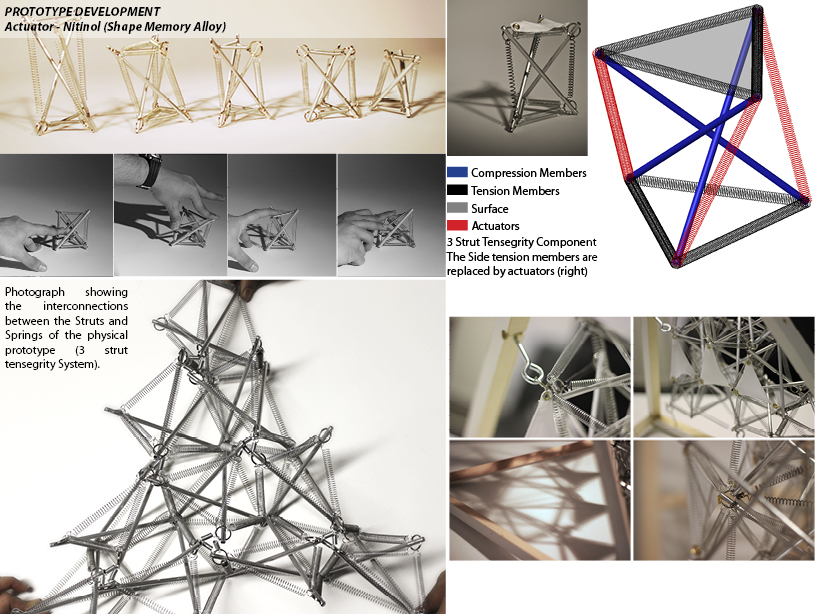 Prototype Development
Prototype Development Final Prototype – Passive System[jwplayer config=”mplayer” width=”818px” height=”600px” file=”https://static.designboom.com/wp-content/compsub/366915/2013-02-26/video_2_1361879676_0446bce9464a62a745c350a737d5ef9b.mp4″ html5_file=”https://static.designboom.com/wp-content/compsub/366915/2013-02-26/video_2_1361879676_0446bce9464a62a745c350a737d5ef9b.mp4″ download_file=”https://static.designboom.com/wp-content/compsub/366915/2013-02-26/video_2_1361879676_0446bce9464a62a745c350a737d5ef9b.mp4″]video
Final Prototype – Passive System[jwplayer config=”mplayer” width=”818px” height=”600px” file=”https://static.designboom.com/wp-content/compsub/366915/2013-02-26/video_2_1361879676_0446bce9464a62a745c350a737d5ef9b.mp4″ html5_file=”https://static.designboom.com/wp-content/compsub/366915/2013-02-26/video_2_1361879676_0446bce9464a62a745c350a737d5ef9b.mp4″ download_file=”https://static.designboom.com/wp-content/compsub/366915/2013-02-26/video_2_1361879676_0446bce9464a62a745c350a737d5ef9b.mp4″]video
 Architectural Vision
Architectural Vision