Flexible and soft robot with built-in gravity and touch sensors
A group of roboticists at the University of California San Diego, in collaboration with researchers at the BASF Forward AM, has produced a 3D-printed robotic gripper embedded with fluidic control circuits that works well enough not to need the use of electronics. By using built-in gravity and touch sensors, the flexible 3D-printed robotic gripper can pick up, hold, and release objects. The research team says that no such gripper existed before this work, at least without employing the help of electronics to make it work.
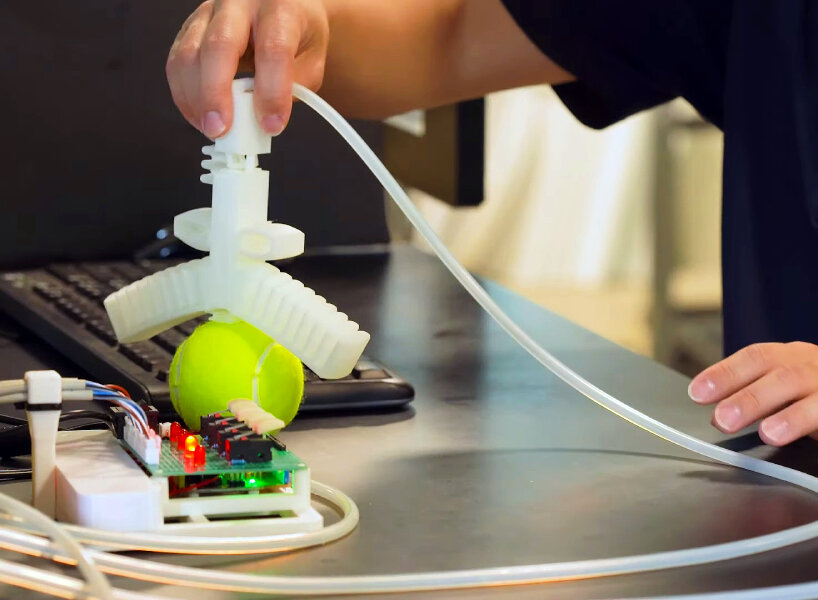
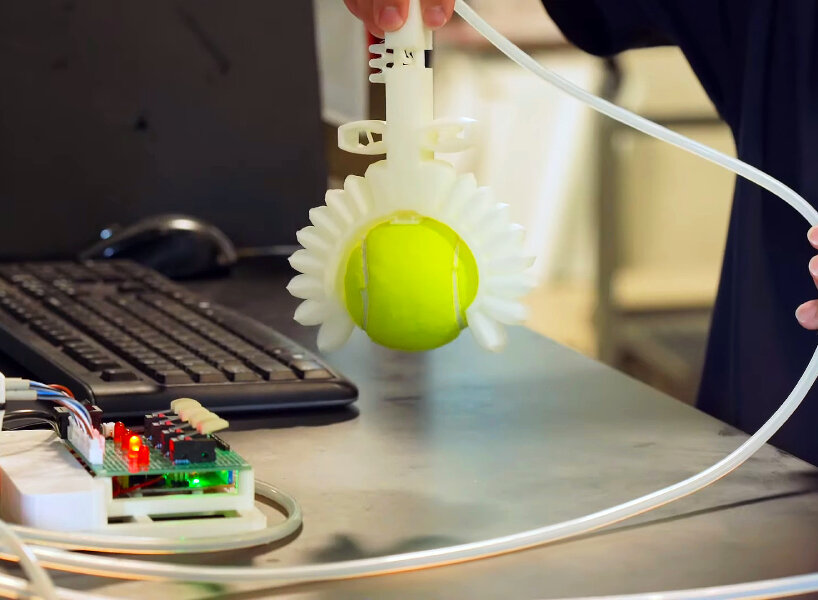
The 3D-printed robotic gripper has two claws that can both grip and release objects. It functions through a series of valves resembling tiny doors that open and close. When the user turns the gripper horizontally, the airflow inside the valves changes, and this triggers the two fingers of the gripper to release whatever they are holding. So whenever the user needs to pick up something, they just need to press the 3D-printed robotic gripper onto the object until the valves get triggered and the claws close up. If they want to let go of the item, they just turn the gripper sideways, and it will automatically release it.
video stills by University of California San Diego via Youtube
3D-printed soft robotic gripper with pneumatic valves
Soft robots are made from flexible materials that are often powered by air. Traditionally, making them was a complex and manual process, but researchers found a way to make them using 3D printing, specifically a method called Fused Filament Fabrication (FFF). The 3D printing technique allows them to create more intricate and complex structures with less manual work. But there were challenges with this 3D printing method for soft robots since the printed robots were often too stiff and had leaks.
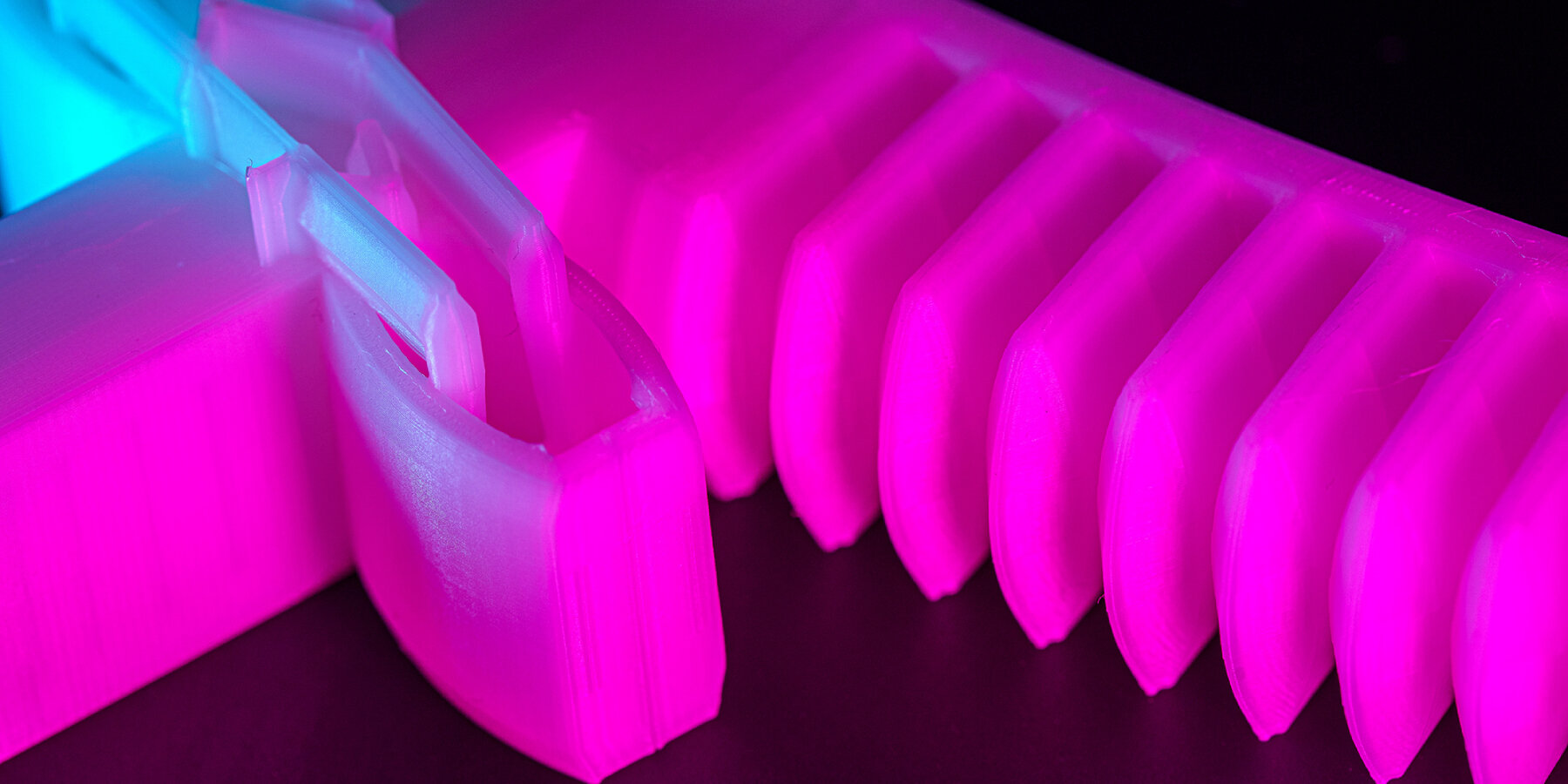
To solve this problem, the roboticists and researchers of the University of California San Diego and BASF Forward AM came up with a design that allowed them to print soft and airtight robotic devices with embedded fluid control components (actuators and valves) all in one go. They successfully printed actuators (parts that move) that were much softer than previous attempts and could bend into a complete circle. They also printed pneumatic valves (parts that control airflow) that could handle high pressure with low control pressure.
By combining these soft actuators and valves, they created a fully 3D-printed gripper that works without any electronics. The gripper then – a research product by Yichen Zhai, Albert de Boer, Martin Faber, Rohini Gupta, and Michael T. Tolley – can maintain its softness and airtightness while being made in a single 3D printing process that takes about 16 hours and 19 minutes. There is also no need for additional manual work or fixing defects after printing, making the process repeatable and accessible to others.
the 3D-printed robotic gripper is embedded with fluidic control circuits that help it pick up and let go of objects

just by turning it sideways, it drops the object it is holding

close-up of the valve that triggers the hold

the 3d printed robotic gripper is also flexible thanks to the method called Fused Filament Fabrication
University of California San Diego and BASF Forward AM develop the 3D-printed robotic gripper
3D printing (766)
 Jul 22, 2024
Jul 22, 2024 Jul 20, 2024
Jul 20, 2024 Jul 13, 2024
Jul 13, 2024 Jul 02, 2024
Jul 02, 2024 Jun 26, 2024
Jun 26, 2024robots (535)
 Jun 22, 2024
Jun 22, 2024 Jun 21, 2024
Jun 21, 2024 May 29, 2024
May 29, 2024 Apr 30, 2024
Apr 30, 2024PRODUCT LIBRARY
 Jul 22, 2024
Jul 22, 2024 Apr 22, 2024
Apr 22, 2024 Mar 21, 2024
Mar 21, 2024 Mar 13, 2024
Mar 13, 2024