AQUA2 in action
dr. gregory dudek and PhD candidates junaed sattar and anqi xu of mcgill university‘s school of computer science in montreal, canada, have developed AQUA2, a robot which can do what no other robot can do: move about on land as well as swim and dive in the water.
showcased during the recent G8/G20 summit’s international media centre, AQUA2 is part of the aqua project which explores the science and technologies for the interpretation of underwater video footage, the identification of underwater features, human-robot interaction, the modelling of 3D scenes using vision and acoustics, vehicle control, position estimation and mechanical design.
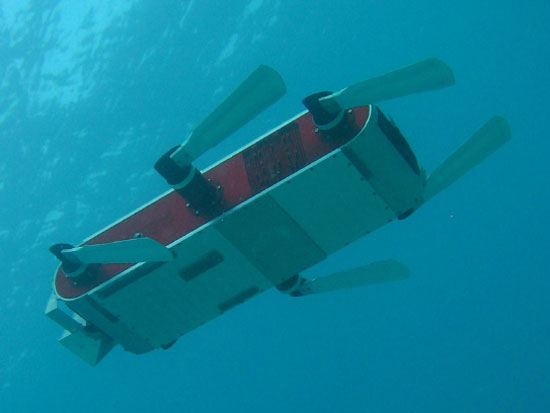
 AQUA2 underwater
AQUA2 underwater
the autonomous underwater vehicle (AUV) uses six independently controlled fins to provide a highly maneuverable underwater sensor platform. the arrangement of highly compliant thrusting surfaces results in a vehicle that unlike traditional thruster designs poses no danger to humans or sea life and can land or take-off with minimal impact. the robot has been tested to a depth of 120 feet, and has an intended operating range from the shoreline to 100 feet.
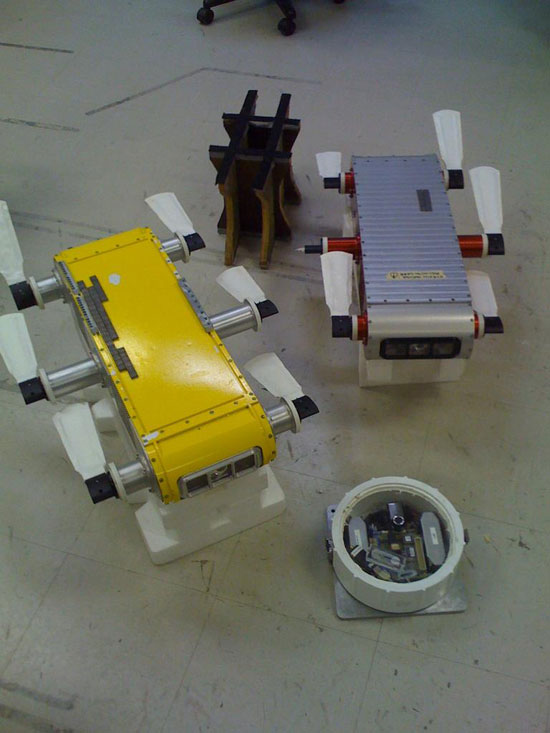 AQUA2 models
AQUA2 models
AQUA2 is lightweight and portable. it can be easily deployed from two standard sized shipping containers that can be transported by commercial aircraft carriers as luggage. the vehicle requires no external support vessel for either deployment or operation. it is an ideal sensor platform for a wide range of tasks in environmental inspection and reclamation, aquaculture and national defense.
AQUA2 in ‘land mode’ option
vehicle components, options and specifications: body: six-legged amphibious robot rated for operation to 100 feet, including onboard control computer and motor controller components including gait generation software. vision system: second onboard PC104+ processor and software suitable for image and video acquisition and computationally intensive vision tasks including onboard stereo and visual target localization. the vision subsystem is based on the linus operating system. front and rear camera modules: one or two front or rear mounted digital cameras suitable for navigation, data acquisition or stereo reconstruction of the local environment. battery pack: quick replace battery pack are used by the vehicle. it requires two battery packs to function and provides 5 hours of total operation time. a mil-spec quick recharger for the onboard batteries and lower cost slow chargers are also available. operator control unit (OCU): a self-contained operator control unit that allows the vehicle to be operated using an optical fiber tether. optical tether system: communicate with the vehicle via ethernet transmitted over fibre optic tether. the tether allows the vehicle to be networked with other devices including the OCU above, various lengths available. wireless ethernet: a wireless ethernet (802.11g) option for the AQUA2 when operated out of the water. additional options: software autopilot system, image storage and manipulation, armored and lightweight tethers, rugged laptop with operator control interface, specialized leg sets for different terrains, remote video storage unit, fiber-optic ethernet router and hub.
ROBOTS (529)
 Mar 19, 2024
Mar 19, 2024 Mar 04, 2024
Mar 04, 2024 Feb 06, 2024
Feb 06, 2024PRODUCT LIBRARY
 Apr 22, 2024
Apr 22, 2024 Mar 21, 2024
Mar 21, 2024 Mar 13, 2024
Mar 13, 2024 Feb 24, 2024
Feb 24, 2024