‘HAL’ exoskeleton by cyberdyne
at CES 2011, japan-based cyberdyne offered some of the first public demos of its ‘HAL‘ (‘hybrid assistive limb’) exoskeleton.
the device involves two systems: a ‘voluntary control system’ that interprets the wearer’s intended actions, and a ‘robotic autonomous control system’ that actually enacts physical movement.
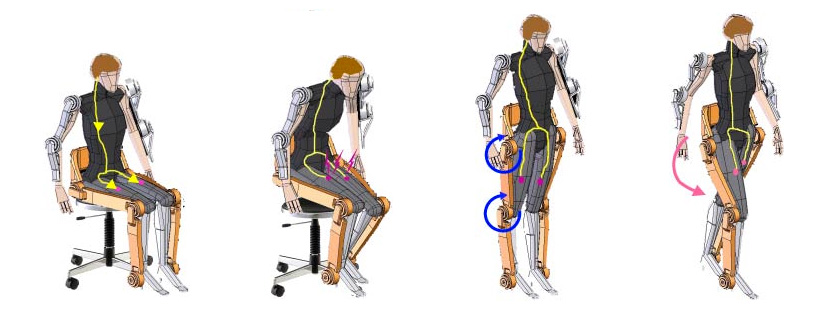
 left: ‘HAL’ interprets user’s brain signals and works with user’s movements to assist in daily activities (image courtesy of dvice) right: a 2009 prototype is tested on the streets of tokyo (image courtesy of allaboutz)
left: ‘HAL’ interprets user’s brain signals and works with user’s movements to assist in daily activities (image courtesy of dvice) right: a 2009 prototype is tested on the streets of tokyo (image courtesy of allaboutz)
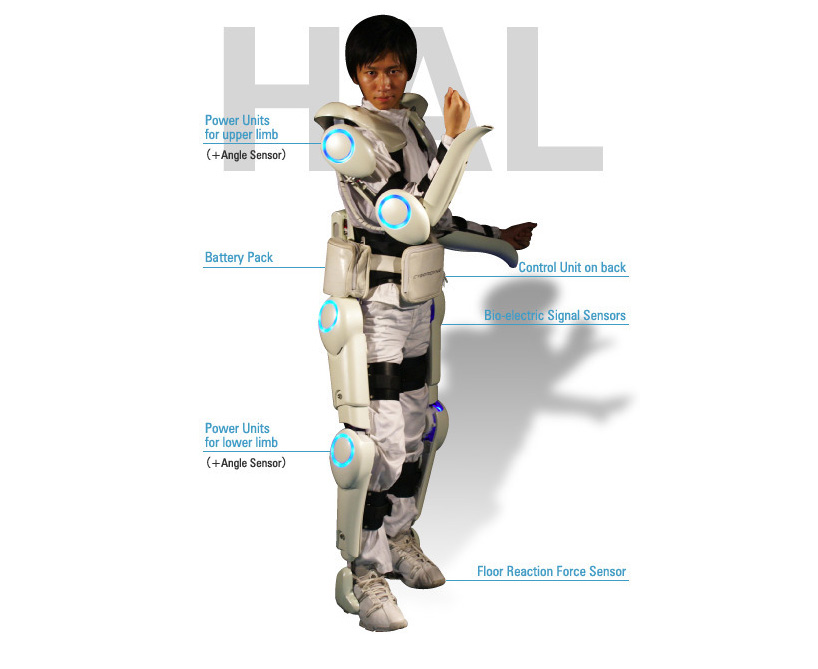
when a person attempts physical activity, nerve signals are sent from the brain to the muscles. ‘HAL’ works by picking up on the bioelectric signals that appear on the surface of the skin as a result of this process. an internal computer analyzes the intended force of the action and calculates the amount of power that will be needed to assist the user.
the ‘robotic autonomous control system’ then generates the appropriate movement of the device’s limbs. the entire process completes a fraction of a second earlier than the user’s muscles actually move, so that human and machine are working in sync.
 concept diagram of the functioning of ‘HAL’ brain signals sent to muscles are picked up by the system, which then calculates the proper force to assist motion
concept diagram of the functioning of ‘HAL’ brain signals sent to muscles are picked up by the system, which then calculates the proper force to assist motion
currently ‘HAL’ is capable of helping individuals stand up from a chair, walk, climb up and down stairs, and hold or lift objects.
the company is planning to begin production with 400 exoskeletons a year, released first to japan and then the rest of the world.
‘HAL’ is demoed at CES2011
CES 2011 (15)
 Mar 21, 2011
Mar 21, 2011 Jan 27, 2011
Jan 27, 2011 Jan 17, 2011
Jan 17, 2011 Jan 13, 2011
Jan 13, 2011 Jan 12, 2011
Jan 12, 2011PRODUCT LIBRARY
 Jul 22, 2024
Jul 22, 2024 Apr 22, 2024
Apr 22, 2024 Mar 21, 2024
Mar 21, 2024 Mar 13, 2024
Mar 13, 2024