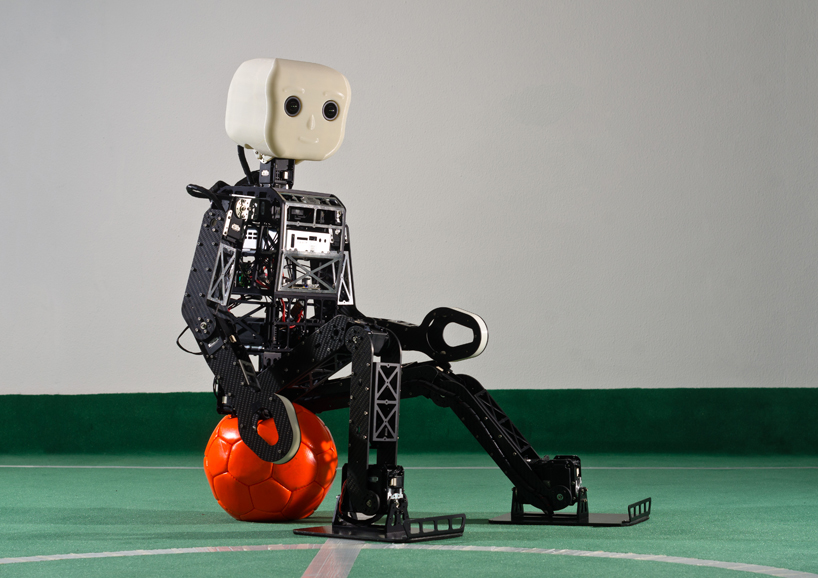
‘nimbRo-OP’ humanoid robot plays soccer
developed by scientists at the university of bonn, ‘nimbRo-OP‘ is an open source humanoid robot capable of playing soccer. created using a linux based software which supports ball perception, walking, kicking, and getting-up motions, ‘nimbRo-OP’ is powered by a dual-core PC that runs on two 1.65GHz processors, 2GB RAM and 64GB SSD.
weighing approximately 6.6kg, the humanoid stands at a height of 95cm. integrated with wi-fi, USB 3.0 connectivity, HDMI capability, gigabit ethernet and a memory card slot, a lithium polymer battery supplies its power. for vision, the ‘nimbRo-OP’ sees the world from a wide-angle camera, a three-axis gyro and three-axis accelerometer.
the robot is composed of 20 networked actuators: 6 per leg, 3 per arm and 2 in the neck which are implemented to configure the generated computer commands into motion. built from carbon composite, aluminum and ABSplus, the lightweight conception allows for the robot to be extremely agile.
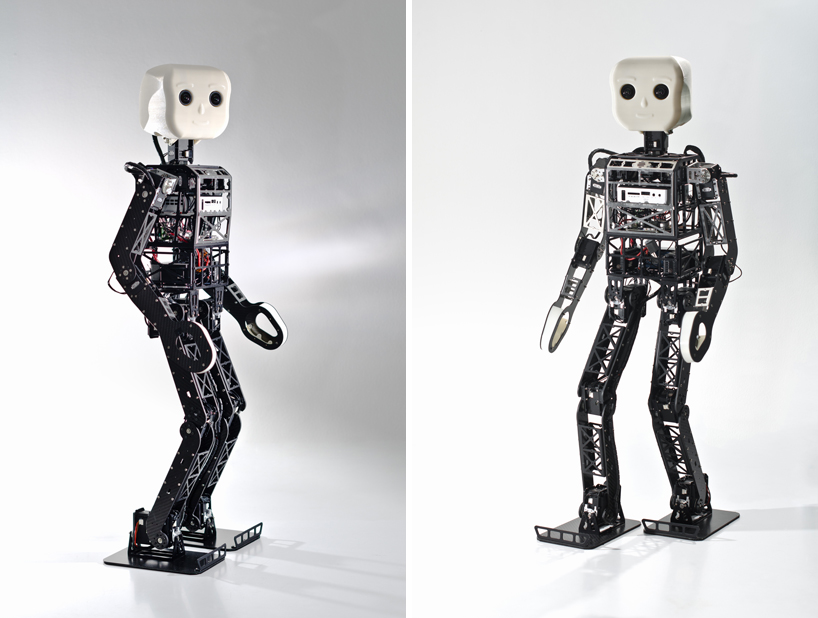
 at its full standing position the humanoid robot measures 95cm tall
at its full standing position the humanoid robot measures 95cm tall
 alternative views
alternative views
‘nimbRo-OP’ humanoid teensize open platform robot in action video courtesy nimbro
‘nimbRo-OP’ video courtesy nimbro
product specifications:
height: 95cm
weight: 6.6kg actuators: 20 networked actuators (robotis dynamixel) 6 per leg (MX-106) 3 per arm (MX-64)
2 in the neck (MX-64) sensors: inertial sensors (in robotis CM-730 controller) 3-axis accelerometer 3-axis gyro hardware: dual-core PC (zotac ZBOX nano XS), AMD E-450 processor (2×1.65GHz) memory: 2GB RAM, 64GB SSD, memory card slot connectivity: USB 3.0, HDMI, gigabit ethernet wi-fi: IEEE 802.11b/g/n camera: logitech C905 wide-angle camera battery: lithium polymer 14.8V, 3.6Ah
robots (544)
 Oct 23, 2024
Oct 23, 2024 Oct 15, 2024
Oct 15, 2024 Oct 11, 2024
Oct 11, 2024 Oct 08, 2024
Oct 08, 2024PRODUCT LIBRARY
 Oct 19, 2024
Oct 19, 2024 Oct 11, 2024
Oct 11, 2024 Sep 22, 2024
Sep 22, 2024 Sep 14, 2024
Sep 14, 2024