artificial intelligence research company openAI has trained a human-like robot hand to manipulate physical objects with unprecedented dexterity. ‘dactyl’ was taught entirely in simulation without any human input, and later transferred its knowledge to a real world robot, eventually manipulating a six-sided cube. ‘our results show that it’s possible to train agents in simulation and have them solve real-world tasks, without physically-accurate modeling of the world,’ the team at the elon musk co-founded company say.
dactyl achieved the tested maximum of 50 consecutive rotations
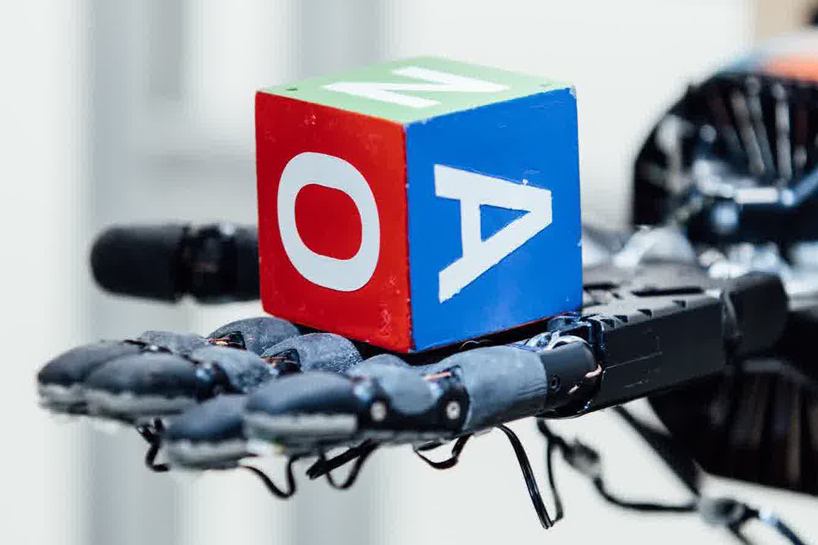
using a shadow dexterous hand, openAI placed a cube in the palm of the hand and asked dactyl to reposition it into a different orientation. dactyl learned to solve the object reorientation task entirely in simulation without any human input. ‘our approach, domain randomization, learns in a simulation which is designed to provide a variety of experiences rather than maximizing realism,’ the team say in a research paper on the project. ‘this gives us the best of both approaches: by learning in simulation, we can gather more experience quickly by scaling up, and by de-emphasizing realism, we can tackle problems that simulators can only model approximately.’

dexterous manipulation behaviors autonomously learned by dactyl
using humanoid hands to effectively manipulate objects has proved a long-standing challenge in robotic control. the completion of this project achieves a full cycle of artificial intelligence development that openAI has been working on for the past two years.

training images used for learning to estimate the pose of the block
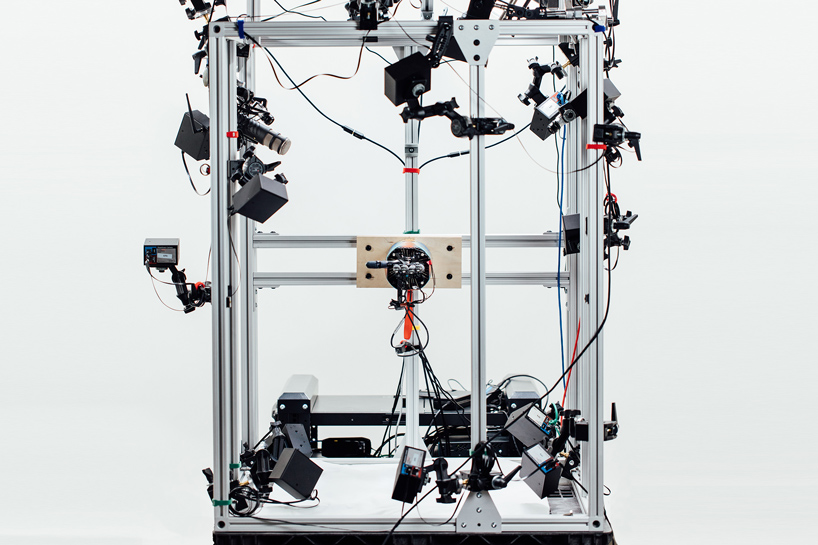
dactyl lab setup with shadow dexterous hand, phasespace motion tracking cameras, and basler RGB cameras
this project completes a full cycle of AI development openAI has been pursuing for the past two years
ARTIFICIAL INTELLIGENCE (350)
 Apr 13, 2024
Apr 13, 2024 Apr 11, 2024
Apr 11, 2024 Apr 09, 2024
Apr 09, 2024 Apr 08, 2024
Apr 08, 2024 Mar 22, 2024
Mar 22, 2024ROBOTS (529)
 Mar 19, 2024
Mar 19, 2024 Mar 04, 2024
Mar 04, 2024 Feb 06, 2024
Feb 06, 2024PRODUCT LIBRARY
 Mar 21, 2024
Mar 21, 2024 Mar 13, 2024
Mar 13, 2024 Feb 24, 2024
Feb 24, 2024 Feb 07, 2024
Feb 07, 2024