
a team of technologists at MIT have developed a robot gripper that uses a 3D-printed origami structure to lift up to 100 times its own weight. the cone-shaped gripper comprises three parts — a 3D-printed, 16-piece silicone rubber skeleton with a gripper-to-mount connector encased by an airtight skin.
a vacuum collapses the origami-inspired gripper which then closes around the object functioning like a stronghold grasp. the soft robot gripper can adapt to the shape of whatever it’s grabbing without compromising its strength. this allows it to pick up delicate objects without harming them, while still maintaining a strong enough grip to lift 100 times its own weight.
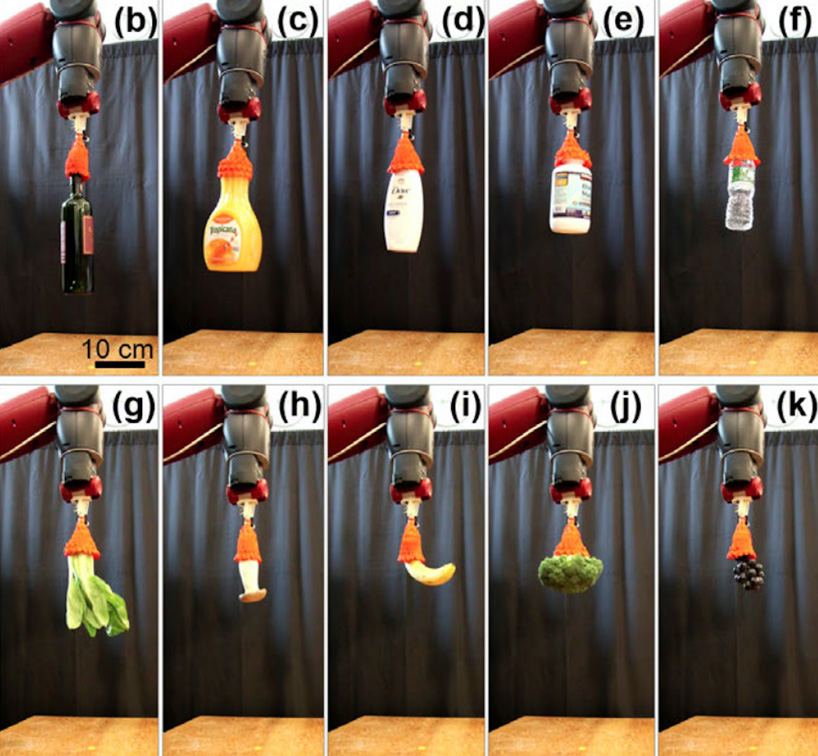
images courtesy of jason dorfman – MIT CSAIL
the device is subject to a newly published paper, ‘a vacuum-driven origami ‘magic-ball’ soft gripper‘ which explores versatile systems in place of robotic hands. it was inspired by the ‘magic ball,’ an origami design that’s folded from a rectangular piece of paper to create a spherical and cylindrical shape.
‘one of my moonshots is to create a robot that can automatically pack groceries for you,’ mit professor daniela rus, director of csail and one of the paper’s senior authors, said in a statement. ‘previous approaches to the packing problem could only handle very limited classes of objects — objects that are very light or objects that conform to shapes such as boxes and cylinders, but with the … gripper system, we’ve shown that we can do pick-and-place tasks for a large variety of items ranging from wine bottles to broccoli, grapes, and eggs.‘
video by MITCSAIL
3D printing (766)
 Jul 22, 2024
Jul 22, 2024 Jul 20, 2024
Jul 20, 2024 Jul 13, 2024
Jul 13, 2024 Jul 02, 2024
Jul 02, 2024 Jun 26, 2024
Jun 26, 2024robots (535)
 Jun 22, 2024
Jun 22, 2024 Jun 21, 2024
Jun 21, 2024 May 29, 2024
May 29, 2024 Apr 30, 2024
Apr 30, 2024PRODUCT LIBRARY
 Jul 22, 2024
Jul 22, 2024 Apr 22, 2024
Apr 22, 2024 Mar 21, 2024
Mar 21, 2024 Mar 13, 2024
Mar 13, 2024