
citycar image © william lark, Jr., MIT media lab, smart cities group
under the direction of william j. mitchell, MIT media laboratory presented ‘sustainable urban mobility through light electric vehicles’ at the icsid world design congress during singapore design week 09. introduced at the congress are the greenwheel electric bicycle, the roboscooter electric scooter, and the ‘citycar’ electric automobile – all of which have been developed and prototyped in the MIT media lab’s smart cities group.
‘…we can and should create systems that provide very high levels of mobility service while minimizing energy consumption and supporting a large-scale shift to clean, renewable, more local energy sources. lightweight, smart battery-electric vehicles are one obvious and essential part of such systems. recharging infrastructure is a second part. the integration of electric vehicles and their recharging infrastructure with smart electric grids – to enhance the efficiency of grids and to make them friendlier to clean, renewable, but intermittent energy sources – constitutes a third part. the organization of electric vehicles into highly efficient mobility-on-demand systems is a fourth part. finally, a powerful computational back-end – one that senses and meters the current state of the system, processes large amounts of information in real time, computes optimum responses to evolving demands and conditions, and controls overall system operation – is necessary for effective operation of these systems.
integrating (1) smart battery-electric vehicles, (2) recharging infrastructure, (3) smart electric grids, and (4) mobility-on-demand through (5) urban-scale electronic nervous systems provides the foundation for creating smart sustainable cities. these cities achieve high levels of operational efficiency – and, in particular, energy efficiency and carbon minimization.’ – william j. mitchell
 image ©william lark, Jr., MIT media lab, smart cities group
image ©william lark, Jr., MIT media lab, smart cities group
the citycar electric automobile, developed and prototyped by smart cities, weighs less than a thousand pounds, parks in much less space than a smart car, and is expected to get the equivalent of 150 to 200 miles per gallon of gasoline. since it is battery-electric, it produces no tailpipe emissions.
the car does not have a central engine and traditional power train, but is powered by four in-wheel electric motors. each wheel unit contains drive motor (which also enables regenerative braking), steering, and suspension, and is independently digitally controlled. this enables maneuvers like spinning on its own axis (an o-turn instead of a u-turn), moving sideways into parallel parking spaces, and lane changes while facing straight ahead.
shifting drive to the corners in this way enables the citycar to fold to minimize parking footprint, and to provide front ingress and egress (since there is no engine in the way). this dramatically changes its relationship to streets and cities. it can park nose-in to the curb in far less than the width of a traditional parking bay, and it can park at very high densities. it is possible to park three or four citycars in the length of a traditional parking bay.
update (1/26/12): the first working beta models of the ‘citycar’ are now in production as the ‘hiriko’ collapsible vehicle. see designboom’s original coverage.
 image © william lark, Jr., MIT media lab, smart cities group
image © william lark, Jr., MIT media lab, smart cities group
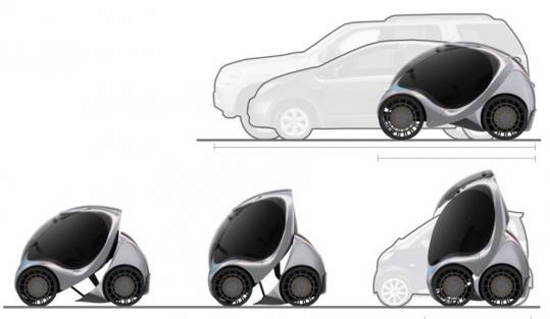 image © MIT media lab, smart cities group
image © MIT media lab, smart cities group
© 2007 MIT
the roboscooter folding electric scooter, developed by the smart cities group features in-wheel electric motors, lithium-ion batteries, and a cast aluminum frame. to minimize parking footprint – which is a key consideration in many contexts where scooters are popular – it folds up into a very compact configuration. for contexts where this is not necessary, the roboscooter can also be produced in non-folding models.
roboscooters are designed to serve as approximate functional equivalents of 50cc gasoline-powered scooters. they are, however, clean, silent, and occupy less parking space. they are also much simpler – consisting of about 150 parts, compared to the 1,000 to 1,500 of an equivalent gasoline-powered scooter – which simplifies supply chains and assembly processes, reduces vehicle costs, and simplifies maintenance.
they can be recharged in their racks. their battery packs are also small enough to be conveniently removable, which opens up the possibilities of charging spare batteries at home, and of battery vending machines that accept discharged batteries and provide fully charged ones.  roboscooter image © michael chia-liang lin, MIT media lab, smart cities group
roboscooter image © michael chia-liang lin, MIT media lab, smart cities group
 roboscooter folding sequence 01 image © michael chia-liang lin, MIT media lab, smart cities group
roboscooter folding sequence 01 image © michael chia-liang lin, MIT media lab, smart cities group
 roboscooter folding sequence 02 image © michael chia-liang lin, MIT media lab, smart cities group
roboscooter folding sequence 02 image © michael chia-liang lin, MIT media lab, smart cities group
 roboscooter folding sequence 03 image © michael chia-liang lin, MIT media lab, smart cities group
roboscooter folding sequence 03 image © michael chia-liang lin, MIT media lab, smart cities group
 roboscooter folding sequence 04 image © michael chia-liang lin, MIT media lab, smart cities group
roboscooter folding sequence 04 image © michael chia-liang lin, MIT media lab, smart cities group
 image © michael chia-liang lin, MIT media lab, smart cities group
image © michael chia-liang lin, MIT media lab, smart cities group
 image © michael chia-liang lin, MIT media lab, smart cities group
image © michael chia-liang lin, MIT media lab, smart cities group
© 2008 MIT
the greenwheel, developed by the MIT media laboratory’s smart cities group is a compact, modular hub unit that provides electric assist and regenerative braking, and also contains lithium-ion batteries. its gearing is arranged to minimize spinning mass, so that it does not affect the ride dynamics.
greenwheels are mechanically and electrically self-contained, and can be fitted to any standard bicycle. they do not require bicycle redesign, the purchase and installation of complex kits, or purchase of entire new bicycles. you just remove the back wheel of your bike and replace it with a greenwheel.
the electric motor of a greenwheel is digitally controlled, which enables precise management of the torque. this is usually provided from a wireless controller on the handlebars (much like a motorcycle throttle), which allows the rider to control the motor with one hand, and eliminates the need for a wire running to the hub. where local regulations require it, a wire can of course be added. it is also possible to provide control from the pedals.
 image © MIT media lab, smart cities group
image © MIT media lab, smart cities group
 image © MIT media lab, smart cities group
image © MIT media lab, smart cities group
electric motorcycle and scooter design (324)
 Jun 11, 2024
Jun 11, 2024 May 15, 2024
May 15, 2024 Apr 29, 2024
Apr 29, 2024 Apr 24, 2024
Apr 24, 2024MIT media lab (56)
 May 26, 2024
May 26, 2024 Sep 21, 2023
Sep 21, 2023 Aug 11, 2023
Aug 11, 2023 Aug 03, 2023
Aug 03, 2023 Aug 01, 2023
Aug 01, 2023singapore design week 09 (10)
 Dec 07, 2009
Dec 07, 2009 Dec 04, 2009
Dec 04, 2009 Dec 03, 2009
Dec 03, 2009 Dec 03, 2009
Dec 03, 2009 Dec 01, 2009
Dec 01, 2009PRODUCT LIBRARY
 Jul 22, 2024
Jul 22, 2024 Apr 22, 2024
Apr 22, 2024 Mar 21, 2024
Mar 21, 2024 Mar 13, 2024
Mar 13, 2024