when developing robots, scientists and engineers have found inspiration in the animal world (see harvard’s 3D-printed octopus robot on designboom here.) the latest addition to this movement is by researchers at caltech and the university of illinois who have developed the ‘bat bot’, a self-contained bat robot with soft, articulated wings. the platform aims to study the flight specialization of bats, including their versatile dynamic wing conformations, as well as its more than 40 active and passive joints.
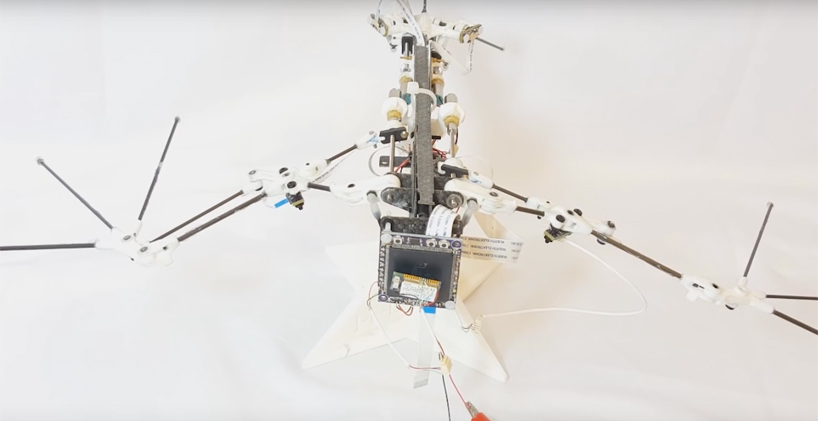
the bat robot is a self-contained robot bat with soft, articulated wings
weighing only 93 grams, the bat bot’s wings spread to roughly one foot and are capable of altering its shape by flexing, extending, and twisting at its shoulders, elbows, wrists, and legs just like the real animal. by mimicking this sophisticated flying mechanism, the bat bot ‘demonstrates one of the most advanced designs to date of a self-contained flapping-winged aerial robot with bat morphology that is able to perform autonomous flight,’ comments alireza ramezani, postdoctoral associate at UIUC.
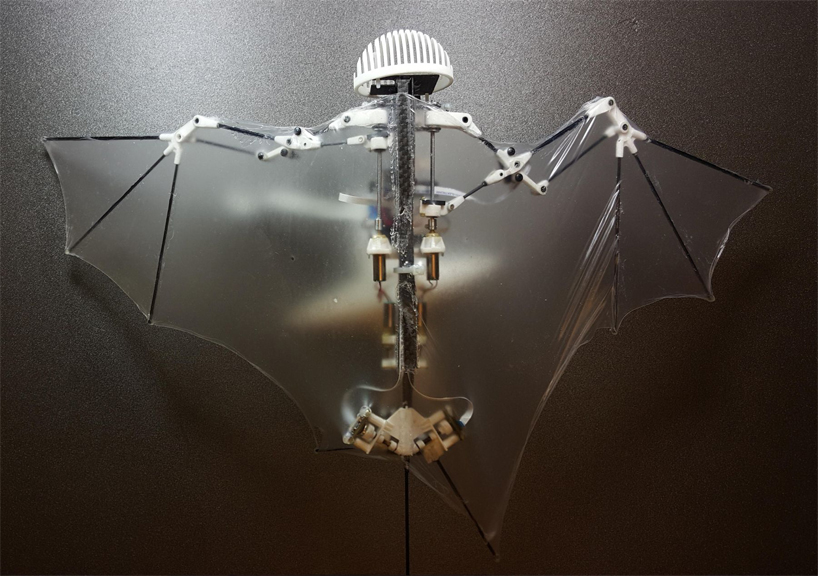
it weights in total 93 grams
‘this robot design will help us build safer and more efficient flying robots, and also give us more insight into the way bats fly,’ says soon-jo chung, associate professor of aerospace and bren scholar in the division of engineering and applied science at caltech, and jet propulsion laboratory research scientist.
bat bot is capable of altering its wing shape by flexing, extending, and twisting at its shoulders, elbows, wrists, & legs
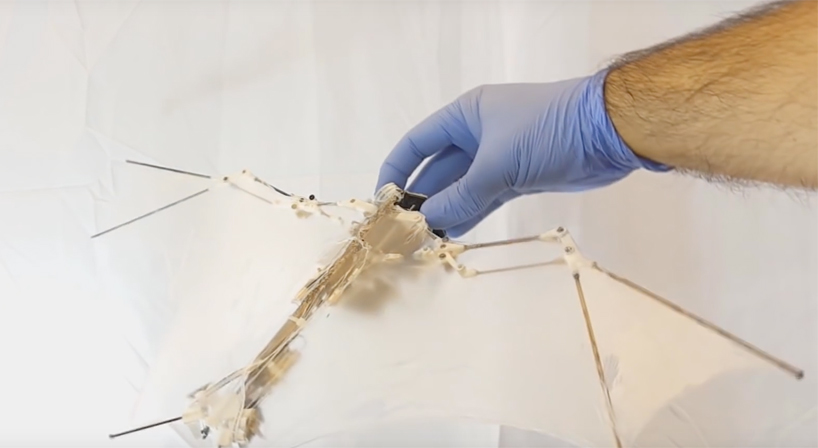
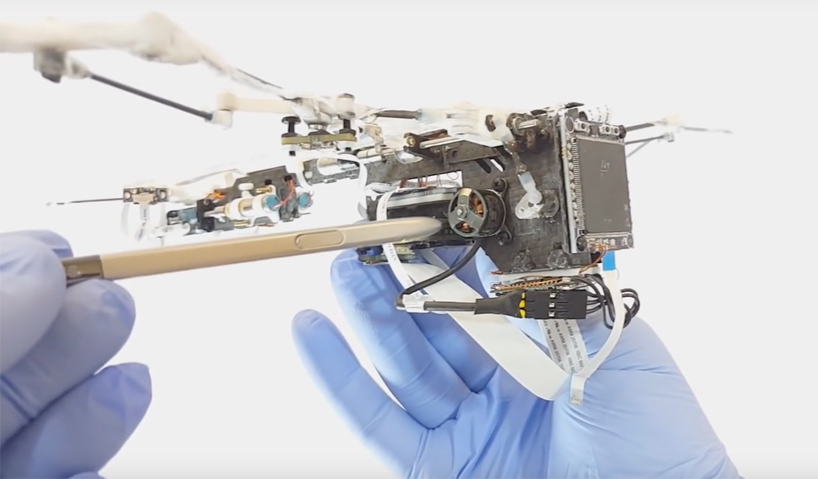
its flight mechanism involves several different types of joints
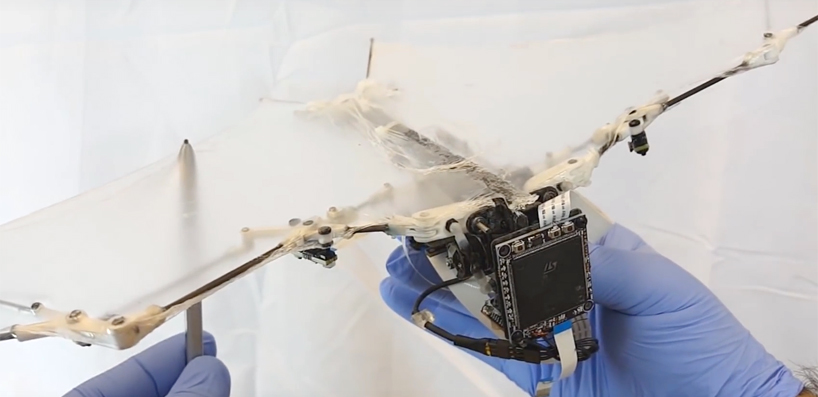
one of the key challenges was to create wings that change shape while flapping
the design has potential applications for environments where more traditional quadrotor drones
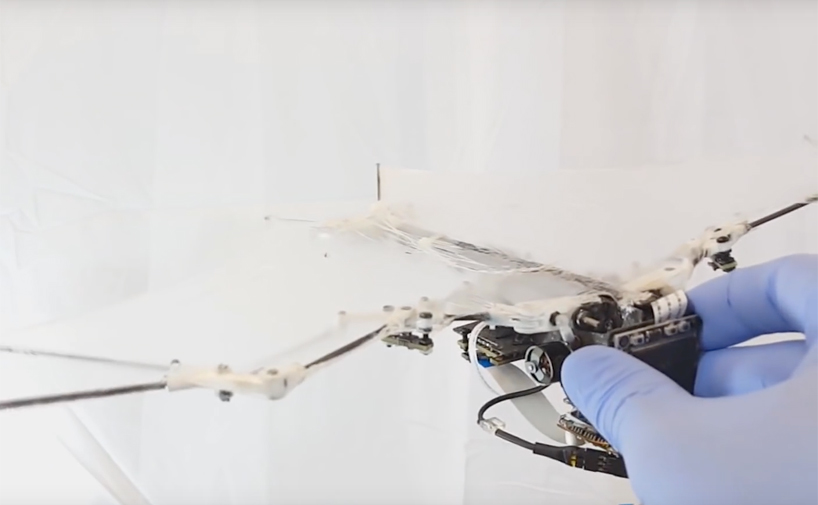
researchers developed a custom ultra-thin (56 microns), silicone-based membrane to simulate the wings
source: caltech
robots (598)
 Feb 17, 2026
Feb 17, 2026 Feb 07, 2026
Feb 07, 2026 Feb 04, 2026
Feb 04, 2026 Jan 19, 2026
Jan 19, 2026 Feb 14, 2026
Feb 14, 2026 Jan 11, 2026
Jan 11, 2026 Dec 08, 2025
Dec 08, 2025 Dec 06, 2025
Dec 06, 2025