MIT and princeton engineers just made the most monotonous topic on earth — the act of picking something out of a bin — a lot cooler. their robotic picker-upper runs an ‘object agnostic grasping algorithm,’ every time it begins its epic journey of tedious lifting. it’s packed with a custom gripper and a suction cup.
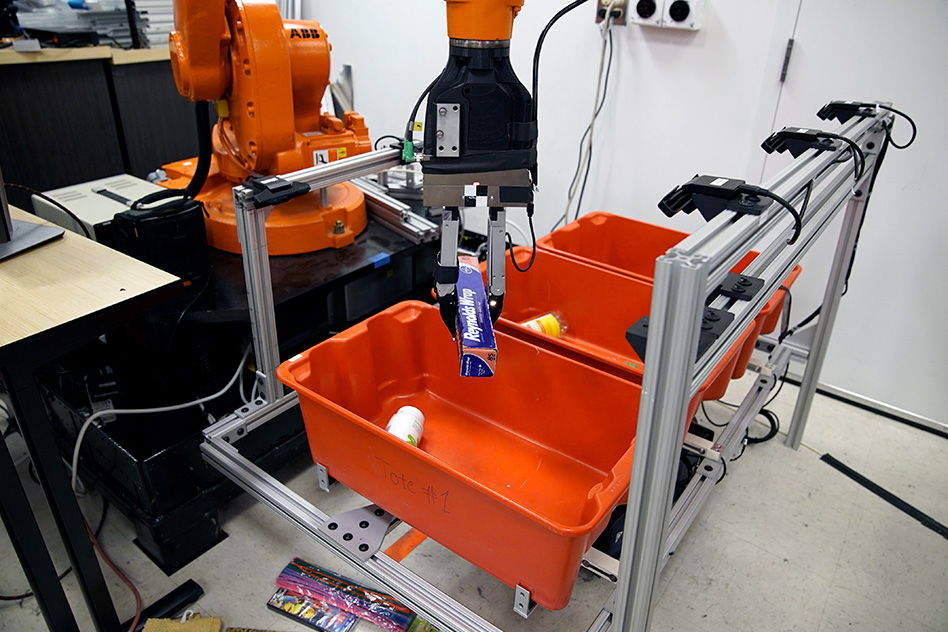
all images courtesy of melanie gonick/MIT
let’s say there’s an item in a bin: a toothbrush. but that toothbrush at the bottom of the bin is also surrounded by a bottle of pills and a tiny ceramic jar of ashes. this robot arm is capable of descending into that bin of items, locating the toothbrush and grabbing it, exactly the way a toothbrush needs to be grabbed. it can then finish the job — grabbing and sorting the bottle of pills and the little jar of ashes, safely-according to the algorithm that MIT and princeton has created.

elliott donlon (left) and francois hogan (right) work with the robotic system
once out of the bin, cameras snap some pics of the toothbrush from various angles. now, the robot can now store the toothbrush into its perfect, robot memory, and place the item in a new bin with its perfect, robot arm. ‘grasp-first-then-recognize:’ thus is — according to MIT — this picky robot’s ‘carpe diem.’
MIT news (80)
 May 16, 2025
May 16, 2025 Nov 09, 2024
Nov 09, 2024 Sep 20, 2024
Sep 20, 2024 Aug 26, 2024
Aug 26, 2024robots (569)


 Jun 30, 2025
Jun 30, 2025 Jun 17, 2025
Jun 17, 2025 May 21, 2025
May 21, 2025