mike thomas has built a high-speed, quad arm robot from scratch, which can solve the rubik’s cube in about three seconds. designed and built in china, the robot, which took thomas about three years to complete, uses a different principle to the one developed by two MIT students recently that solved the cube in a record-breaking 0.38 seconds. what sets this quad arm robot apart is that it is much easier to place and remove the cube, which doesn’t require any modification, and, that the robot has claws that can grab the cube similar to human hands.

cube robot detail
the one-man project required thomas to design almost every component and manufacture it himself. the robot, which solves the cube in about 1.7 seconds less time than the current human record (4.74 s), was developed through the following stages: building the high-speed motor; designing the structure of the machine and optimizing it for the algorithm, while at the same time adjusting the algorithm to the structure as well; building and programming the motor’s PCB and main controller; and, last, debugging and tuning the robot. ‘when increasing the speed, something we don’t see in daily life starts to emerge,’ mike thomas notes, ‘when performing a whole cube turn, both sides of the face are breaking so hard due to high speed, while the middle layer continues to roll due to the inertia, which I call flying edge. to solve this problem I need to tighten the screws of the cube in order to give more friction to the middle layer, however, this will significantly increase the time to turn the side faces. so there still potential to shorten the time as soon as I solve this problem,’ thomas concludes.

the robot solves a cube in 3.209 seconds

flying edge problems
designboom has received this project from our ‘DIY submissions‘ feature, where we welcome our readers to submit their own work for publication. see more project submissions from our readers here.
edited by: sofia lekka angelopoulou | designboom
robots (569)


rubiks cube (10)
 Oct 07, 2024
Oct 07, 2024 Jun 03, 2022
Jun 03, 2022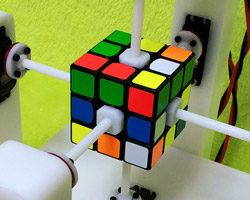 Nov 26, 2018
Nov 26, 2018 Oct 01, 2018
Oct 01, 2018 Aug 04, 2018
Aug 04, 2018 Jun 30, 2025
Jun 30, 2025 Jun 17, 2025
Jun 17, 2025 May 21, 2025
May 21, 2025